

























Closed-loop thyristor current control
System- and communication configuring D7-SYS - SIMADYN D
5-83
Edition 06.2002
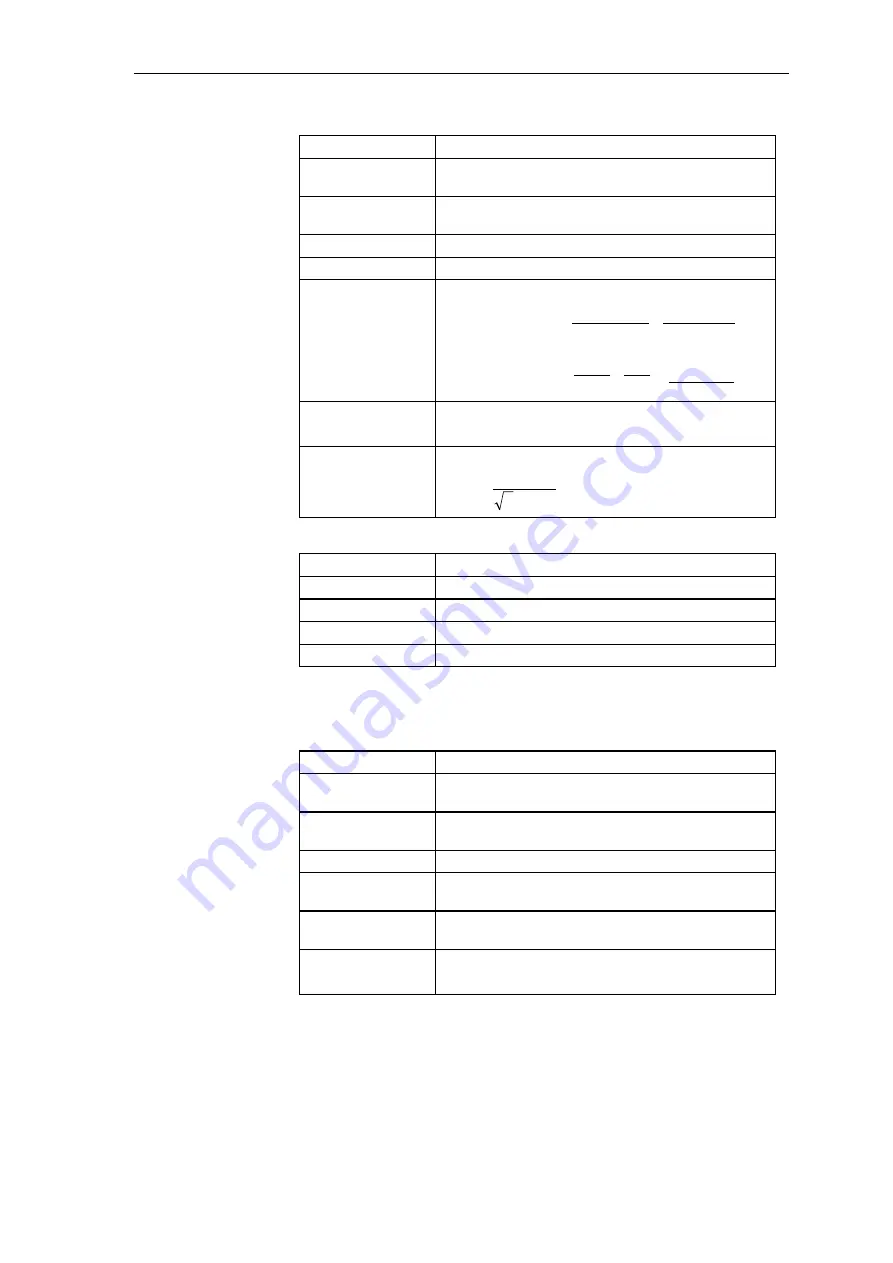
Parameter
Significance
EMF.RRV=1000 [V]
SITOR set voltage normalization [V]
voltage [V] at Vact=10 V/PT
EMF.ARV=400 [V]
Rated system/motor voltage [V]
voltage [V] for YUA=1
EMF.NF=1
Voltage normalization factor
EMF.AAV=400 [V]
Phase-to-phase line supply voltage [V]
EMF.RA=0,0125
Normalized armature resistance
[ ]
(
)
(
)
(
)
(
)
3
10
5
.
12
1
10
400
1
500
.
.
−
⋅
=
∗
∗
Ω
=
∗
∗
Ω
=
A
V
m
RA
EMF
CAV
NF
CAV
ARC
EMF
ARV
EMF
NF
RA
RA
EMF
EMF.YEM, YUA
,YUR, YUL
Voltage actual values, normalized
1
...
0
...
1
ˆ
V
400
0
V
400
+
−
=
+
⇔
⇔
−
EMK.YEV
Pre-control
AAV
2
YEM
YEV
⋅
=
Parameter
Significance
FCS.RRC=5 [A]
Rated current, field unit [A]
FCS.ARC=1,5 [A]
Rated field current [A]
FCS.NF=1
Normalization factor
FCS.FC=1
Field current setpoint
5.8.3.2 Representation with absolute values
Parameter
Significance
CAV.RRC = 30[A]
Rated DC current [A] of the SITOR set
current [A] at V
Iact
=5 V/CT SITOR
CAV.ARC =10 [A]
Rated system/motor current [A] current [A] for
CAV.YC=1
CAV.NF =10
Current normalization factor
CAV.CX1=+15
Absolute value for overcurrent, torque direction 1
permissible overc15 [A]
CAV.CX2=+15
Absolute value for overcurrent, torque direction 2
permissible overcurrent –15 [A]
CAV.YC
Current actual values, absolute
10
...
0
10...
CAV.YC
ˆ
10A
0A
10A
+
−
=
=
+
⇔
⇔
−
Voltage actual
value sensing
Field current
setpoint output
Current actual
value sensing







































































