79/140
Siemens
RXB (KNX) Applications library
CLC and RAD description of functions for CC-02 CM110384en_03
Building Technologies
Control sequences
28 Feb 2009
8 Control
sequences
8.1
Radiator (RAD01)
The radiator application has a continuous heating sequence. The room controllers
operate with a PI algorithm optimized for thermal or motorized valve actuators. (For
simplicity, the diagram below only shows the P-control action.)
This application can also be used for other heating types, e.g. floor heating. However,
the control parameters are not optimized for this.
The control sequences come into operation at the effective setpoints for heating and
cooling (see page 67).
100
0
TR [°C]
Y [%]
SpH
YH
H
Y Output
signal
TR Room
temperature
SpH
Effective heating setpoint
H Heating
sequence
YH Heating
valve
8.1.1
Actuator type selection
All actuators have threads suitable for fitting to both normally-closed (push to open) and
normally-open (pull-to-open) valves. However, the RX applications do not support
inverse control, which means that only actuators with a pulling action can be used with
"pull-to-open" valves and only actuators with a pushing action can be used with "push-
to-open" valves. This is why, in RX applications, valves with mounted actuators are
always closed when de-energized.
Different valve types are available for selection for the radiator:
– Thermal actuators are controlled by an AC 24 V PDM signal.
– Motorized actuators are controlled by an AC 24 V 3- point signal.
– Electromechanical actuators (motors with spring return) have a special PDM
algorithm that ensures that 50 position changes per day are not exceeded.
This causes a slower control behavior.
Thermal and electromechanical actuators, therefore, require one output while
motorized actuators require two.
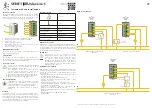
The table below shows the possible combinations:
Actuator
type
Controller Outputs
required
Thermal RXB24.1
Y1
Motorized RXB24.1
M
Y1
Y2
Electro-
mechanic
(ON / OFF)
RXB24.1
Y1
M
STOP
Note!
Directly connected valve
actuators