





























9-61
ET 200U Distributed I/O Station
EWA 4NEB 812 6087–02b
In order to use the IP 266 in an automatic manufacturing process, you can
combine individual traversing applications, positioning corrections, offsets or
dwell times in a traversing program. You can call up these traversing pro-
grams via two special operating modes and process them automatically or
semiautomatically.
The adaptive TEACH–IN mode can create a traversing program simply by
taking positions from individual positioning applications and storing them in
a traversing program when the mode has run its course.
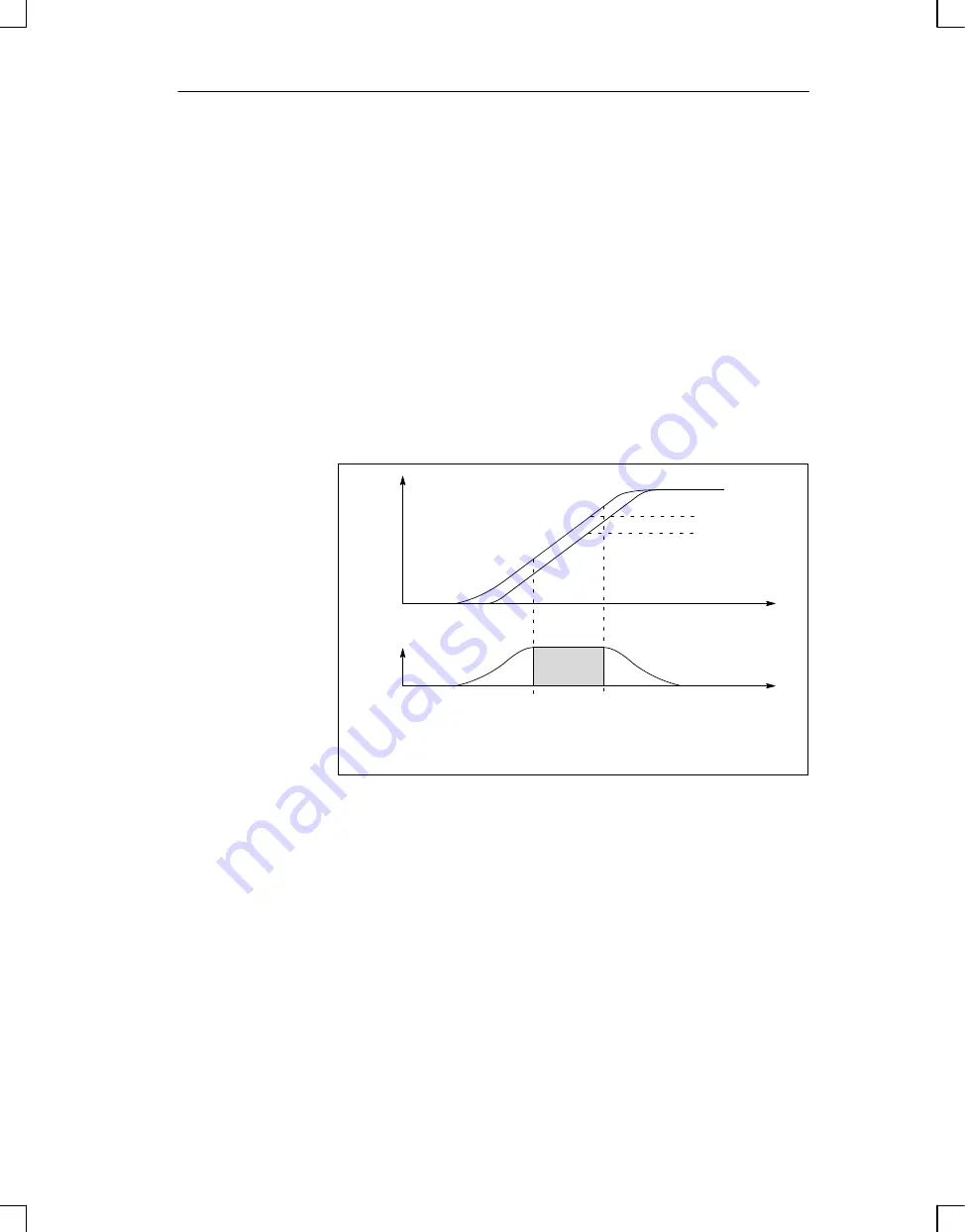
For the positioning operation, the IP 266 calculates a setpoint course from
selected end data and velocity data in conjunction with the programmed ma-
chine data. The actual value follows the selection. The deviation (following
error) which occurs reaches a constant value after the short start–up phase
and must reach zero at the end of the positioning operation (see Figure 9-27).
S
(t)
a
b
t
a
= Setpoint Function
b
= Actual Value
Function:
DS = Following Error
DS
t
DS =const
DS
Figure 9-27
Course of a Following Error during a Positioning Operation
Positioning
Function Modules







































































