



























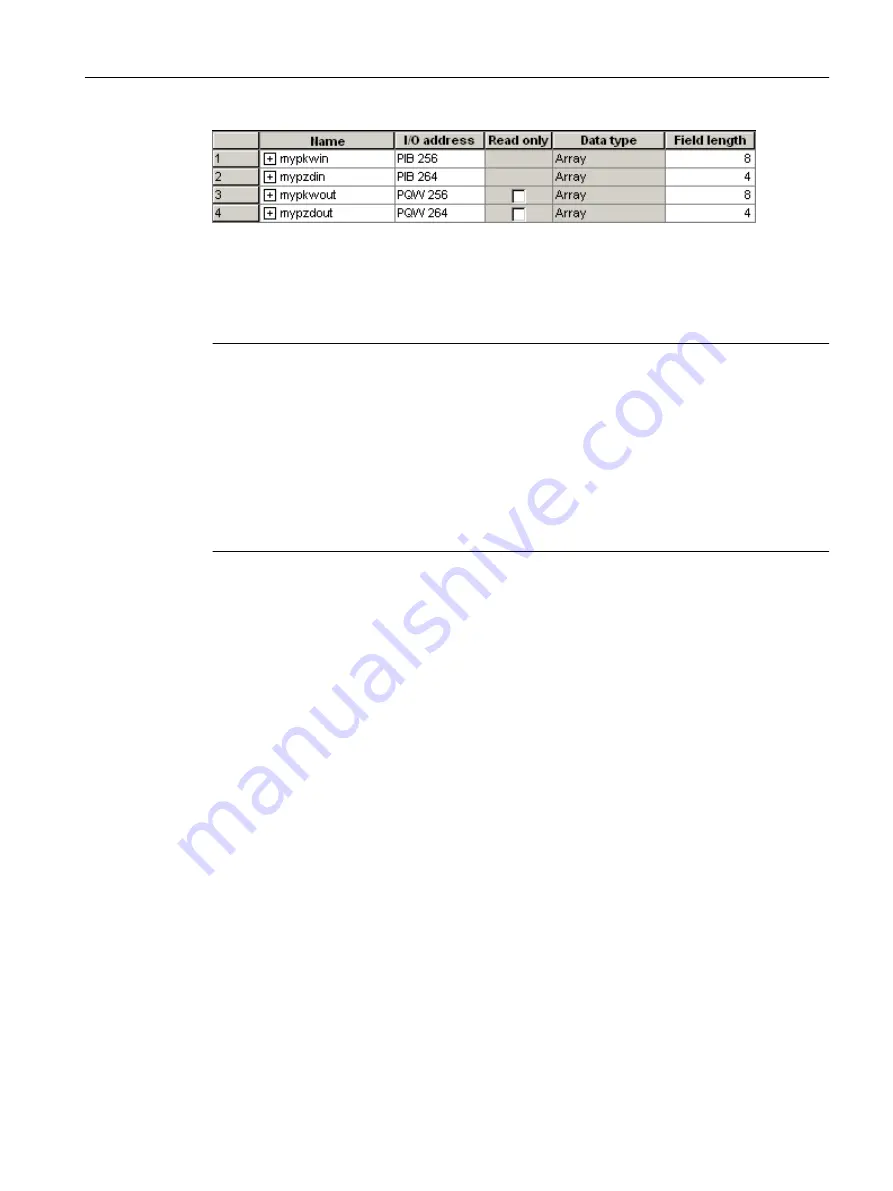
Figure 2-2
Address assignment in SIMOTION SCOUT
Each input and output address has a range of 8 bytes (which corresponds to the parameter
identifier value (PKW) range of POSMO A) and a range of 4 bytes (which corresponds to the
process data (PZD) range of POSMO A).
Note
For additional information, refer to:
●
SIMOTION SCOUT online help
● Programming Manual of the corresponding programming language, e.g.:
–
SIMOTION ST, Structured Text Programming Manual
–
SIMOTION MCC, Motion Control Chart Programming Manual
–
SIMOTION LAD/FBD, Ladder Diagram and Function Block Diagram Programming
Manual
These documents are shipped with SIMOTION SCOUT in electronic form!
Description
2.5 Creating I/O Variables
Supplement to SIMODRIVE POSMO A Positioning Motor
Function Manual, 01/2015
15







































































