


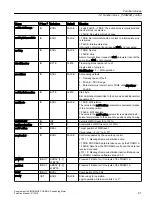



























Name
P type
1)
Data type
Default
Meaning
error
OUT
BOOL
FALSE
= TRUE: Request completed with error (refer to the errorID parame‐
ter)
errorID
OUT
WORD
16#0000 Number of the parameter assignment error signaled by the drive (pa‐
rameter identifier value (PKW) range)
2)
1)
Parameter types: IN = input parameter, OUT = output parameter, IN/OUT = in/out parameter
2)
See
Distributed Positioning Motor on PROFIBUS DP
user manual
Task integration (call)
The _POSMOA_rwParameter function block must be called cyclically in the
BackgroundTask or in the TimerInterruptTask. Calling in the SystemInterruptTask is not
permitted. Calling the function block in synchronous tasks (e.g. IPOSynchronousTask) is not
recommended for runtime reasons.
Fault messages
The TRUE value at the error output parameter indicates a parameterization error. The
errorID output parameter provides more detailed information on the parameterization error that
has occurred or has been signaled by POSMO A. Parameterization errors do not need to be
acknowledged. Changed parameters (e.g. ramp-up time) can be transferred again.
3.5
Function block _POSMOA_rwAllParameter
Task
The _POSMOA_rwAllParameter function block enables reading and writing of the parameter
block of the connected SIMODRIVE POSMO A.
The data to be read or written are saved in a variable created by the user with the
Struct_POSMOA_params data structure when the associated function block instance is
called.
The following parameters are read/written with this function block:
Parameter numbers Read from POSMO A Write to POSMO A
(positioning mode)
Write to POSMO A
(speed-controlled mode)
1...5
Yes
Yes
Yes
6...7
Yes
Yes
No
9...23
Yes
Yes
Yes
24
Yes
Yes
No
25...38
Yes
Yes
Yes
39...53
Yes
No
No
54
Yes
Yes
Yes
55
Yes
No
No
56...61
Yes
Yes
Yes
Function blocks
3.5 Function block _POSMOA_rwAllParameter
Supplement to SIMODRIVE POSMO A Positioning Motor
32
Function Manual, 01/2015







































































