





























Technical data and characteristics
6.3 Data sheets and characteristics
1FT2 synchronous motors for SINAMICS S120
Configuration Manual, 03/2021, A5E50645584B AA
97
6.3.2.11
1FT2208-3AF
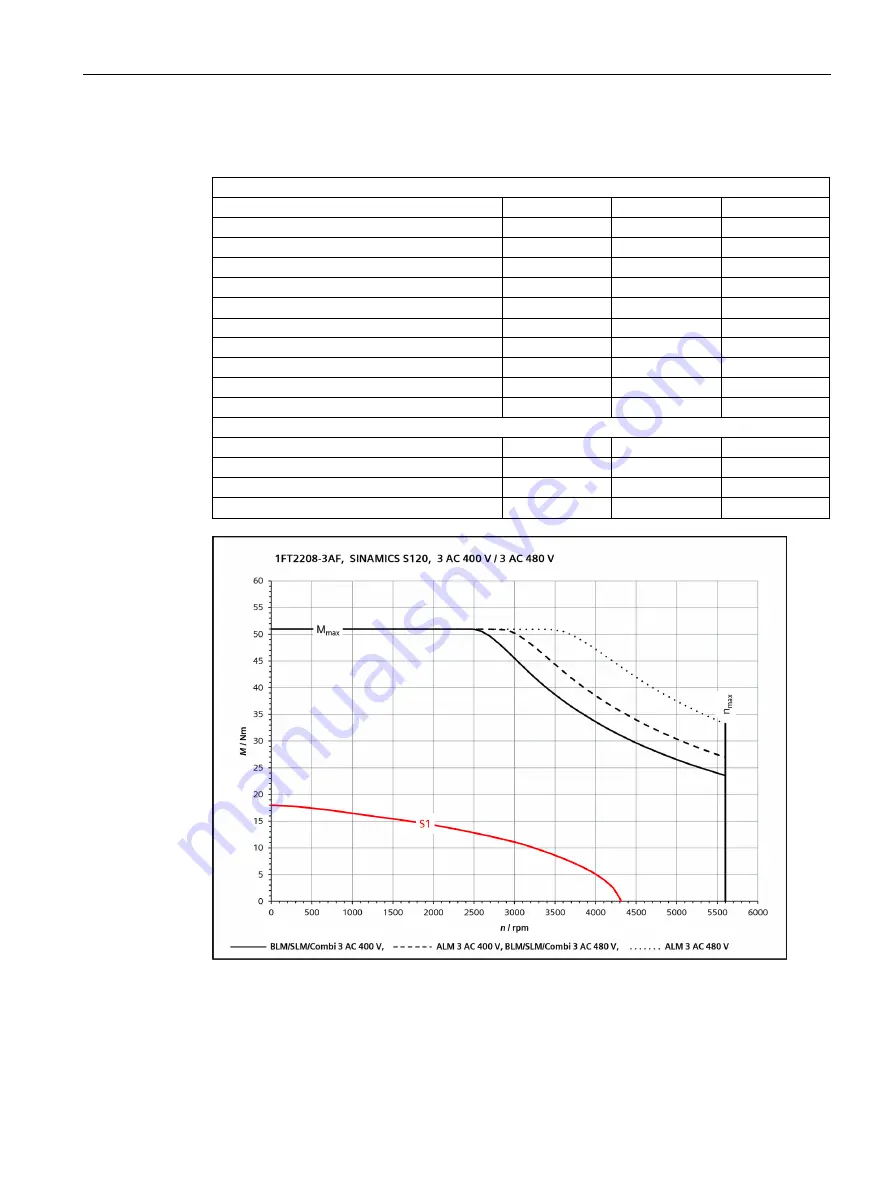
Three-phase servo motor 1FT2208-3AF
Technical specifications in S120 system
Symbol
Unit
Value
Static torque
M
0
Nm
18
Stall current
I
0
A
11.9
Maximum permissible speed (at converter)
n
max Inv
rpm
5600
Maximum torque
M
max
Nm
51
Maximum current
I
max
A
40
Thermal time constant
T
th
min
26
Moment of inertia
J
Mot
kg cm
2
26.5
Moment of inertia (with brake)
J
Mot Br
kg cm
2
33
Weight
m
Mot
kg
12.6
Weight (with brake)
m
Mot Br
kg
14.6
Rated data with S120, 3 AC 400 V / 3 AC 480 V
Rated speed
n
N
rpm
3000
Rated torque
M
N
Nm
11.1
Rated current
I
N
A
7.7
Rated power
P
N
kW
3.5







































































