





























Control functions
7.5 Internal position control (IPos)
SINAMICS V90, SIMOTICS S-1FL6
Operating Instructions, 04/2019, A5E36037884-007
237
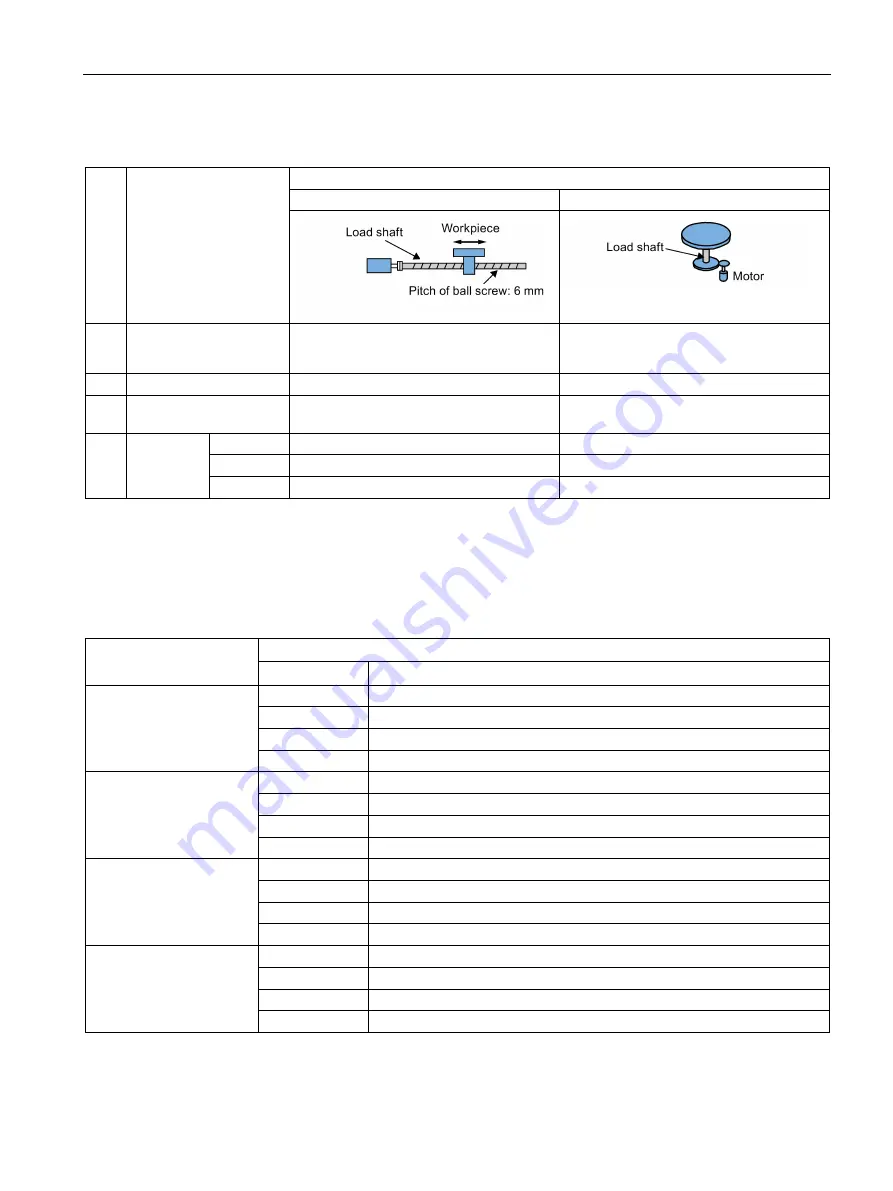
Examples for configuring mechanical system
Step
Description
Mechanical system
Ball screw
Disc table
1 Identify the mechanical
system
•
Pitch of ball screw: 6 mm
•
Reduction gear ratio: 1:1
•
Rotary angle: 360
o
•
Reduction gear ratio: 3:1
2 Define LU
1 LU = 1 µm
1 LU = 0.01
o
3 Calculate the LU per
load shaft revolution
6/0.001 = 6000 LU
360/0.01 = 36000 LU
4 Set param-
eters
p29247
6000
36000
p29248
1
1
p29249
1
3
7.5.2
Setting fixed position setpoint
Eight position setpoints in total are available. Each position setpoint comes from one group
of position data.
Fixed position setpoint
Corresponding parameters
Parameter
Description
Fixed position setpoint 1
p2617[0]
Fixed position setpoint 1 (P_pos1)
p2618[0]
Speed of fixed position setpoint 1 (P_pos_spd1)
p2572
IPos maximum acceleration
p2573
IPos maximum deceleration
Fixed position setpoint 2
p2617[1]
Fixed position setpoint 2 (P_pos2)
p2618[1]
Speed of fixed position setpoint 2 (P_pos_spd2)
p2572
IPos maximum acceleration
p2573
IPos maximum deceleration
Fixed position setpoint 3
p2617[2]
Fixed position setpoint 3 (P_pos3)
p2618[2]
Speed of fixed position setpoint 3 (P_pos_spd3)
p2572
IPos maximum acceleration
p2573
IPos maximum deceleration
Fixed position setpoint 4
p2617[3]
Fixed position setpoint 4 (P_pos4)
p2618[3]
Speed of fixed position setpoint 4 (P_pos_spd4)
p2572
IPos maximum acceleration
p2573
IPos maximum deceleration







































































