





























Control functions
7.8 Communicating with the PLC
SINAMICS V90, SIMOTICS S-1FL6
Operating Instructions, 04/2019, A5E36037884-007
281
DI simulation example in S control mode
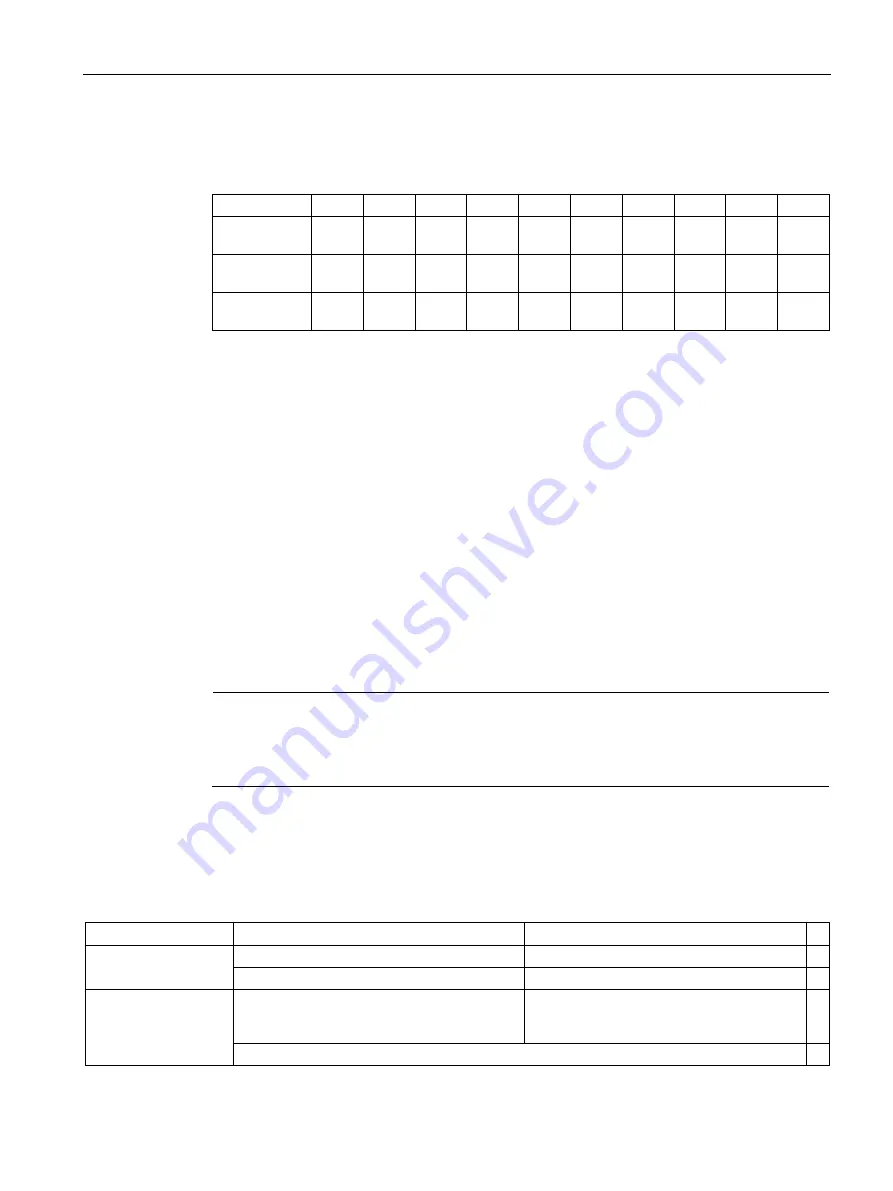
In S control mode, the default digital input signal assignment is as follows:
Digital input
DI1
DI2
DI3
DI4
DI5
DI6
DI7
DI8
DI9
DI10
Signal
SON
REST CWL CCWL CWE CCWE SPD1 SPD2 EMGS C-
MODE
Register
40281 (p0795)
Bit 0
Bit 1
Bit 2
Bit 3
Bit 4
Bit 5
Bit 6
Bit 7
Bit 8
Bit 9
Register
40283 (p0796)
Bit 0
Bit 1
Bit 2
Bit 3
Bit 4
Bit 5
Bit 6
Bit 7
Bit 8
Bit 9
For more information about the DI assignment, refer to "Digital inputs/outputs (DIs/DOs)
(Page 122)".
●
Set the simulation mode for DI1
To simulate DI1 with Modbus, you need to set bit 0 = 1 for register 40281.
●
Set the setpoint for DI1
After the simulation mode of DI1 is set, you can set the setpoint for DI1 with register
40283 to enable the DI signal.
In S control mode, DI1 is assigned with SON by default, so we need to trigger a rising
edge to enable the SON signal. Set bit 0 = 0 for register 40283 and then set the bit to 1. A
rising edge is triggered. The motor is now in "S ON" state.
7.8.2.3
Acyclic communication
The SINAMICS V90 servo drive supports acyclic communication via data set 47.
The maximum data length per request is 240 bytes.
Note
Values in italics
Values in italics in the following tables mean that you have to adjust these values for a
specific request.
Data block setting
Reading parameter values
The table below formats a request to read parameters.
Data block
Byte n
Bytes n + 1
n
Header
Reference
00 hex ... FF hex
01 hex: Read job
0
02 hex (ID of drive objects, at V90 always = 2) Number of parameters (m)
2
Address, parameter 1 Attribute
10 hex:
Parameter value
Number of the indices
00 hex ... EA hex
(For parameters without index: 00 hex)
4
Parameter number
0001 hex ... FFFF hex
6







































































