





























Control functions
7.8 Communicating with the PLC
SINAMICS V90, SIMOTICS S-1FL6
288
Operating Instructions, 04/2019, A5E36037884-007
Byte
Description
User data
0001 h
2F1A h
8002 h
0202 h
1001 h
0461 h
0000 h
1001 h
71CA h
0000 h
0801 h
4134 h
7AE1 h
0301 h
0002 h
7,8
9,10
11,12
13,14
15,16
17,18
19,20
21,22
23,24
25,26
27,28
29,30
31,32
33,34
35,36
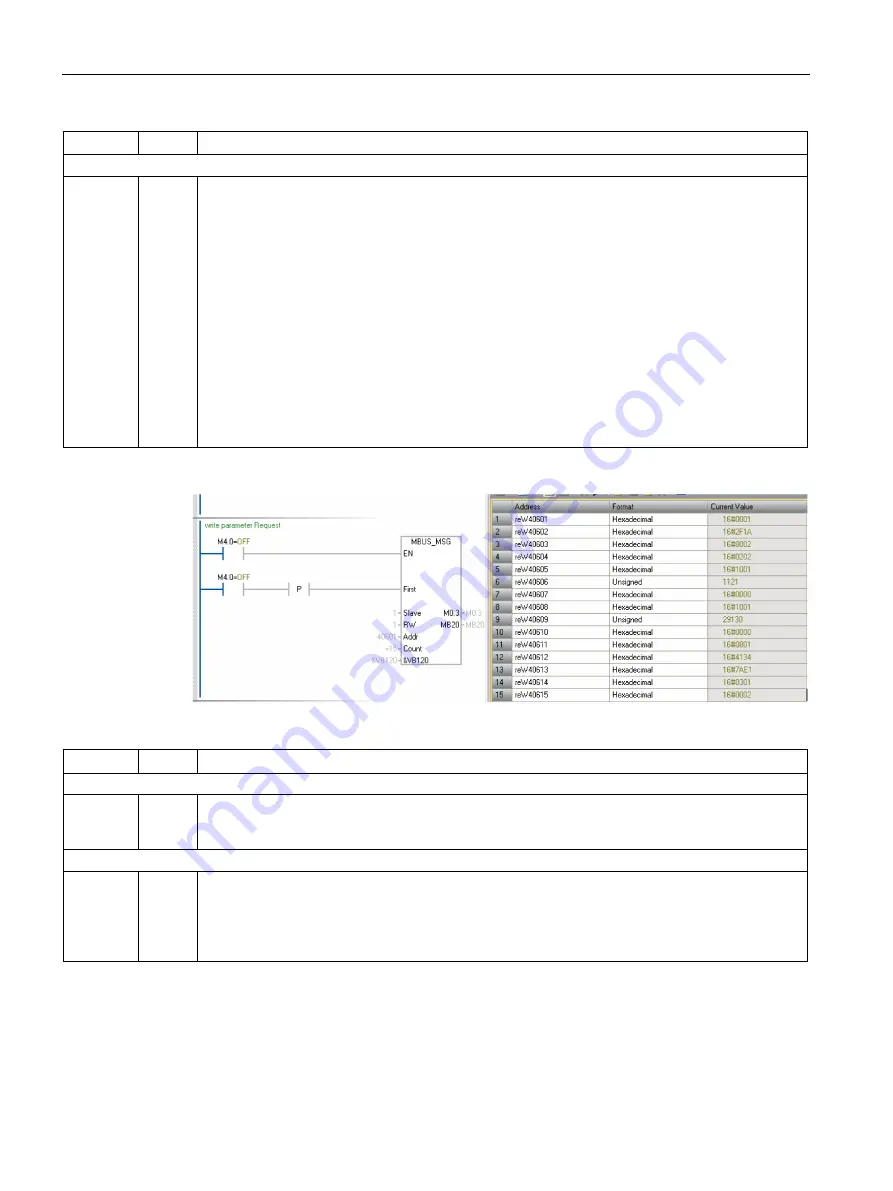
40601: ds47=1 (activate request)
40602: Function 2F h (47), request length 26 bytes (1A h)
40603: Request reference = 80 h, request identifier = 2 h (write)
40604: V90 = 2 h, number of parameters = 2
40605: Attribute, number of elements of the first parameter
40606: First paramter number = p1121
40607: First parameter subindex = 0
40608: Attribute, number of elements of the second parameter
40609: Second paramter number = p29130
40610: Second parameter subindex = 0
40611: Format, number of values of the first parameter
40612: First parameter value 11.28 (41347AE1 h)
40613: First parameter value
40614: Format, number of values of the second parameter
40615: Second parameter value 2
Write the PLC command from registers 40601 to 40615:
The table below formats a response for successful write operation.
Byte
Description
Header
01 h
03 h
20 h
0
1
2
Slave address
Function code (read)
Number of following data bytes (20 h: 32 bytes
≙
16 registers)
User data
0002 h
2F04 h
8002 h
0202 h
3,4
5,6
7,8
9,10
40601: DS47 Control = 2 (request was executed)
40602: Function code 2F h (47), response length 4 bytes
40603: Request reference mirrored = 80 h,
response identifier = 2 (change parameter)
40604: V90 = 2 h, number of parameters = 2







































































