





























Control functions
7.9 Absolute position system
SINAMICS V90, SIMOTICS S-1FL6
292
Operating Instructions, 04/2019, A5E36037884-007
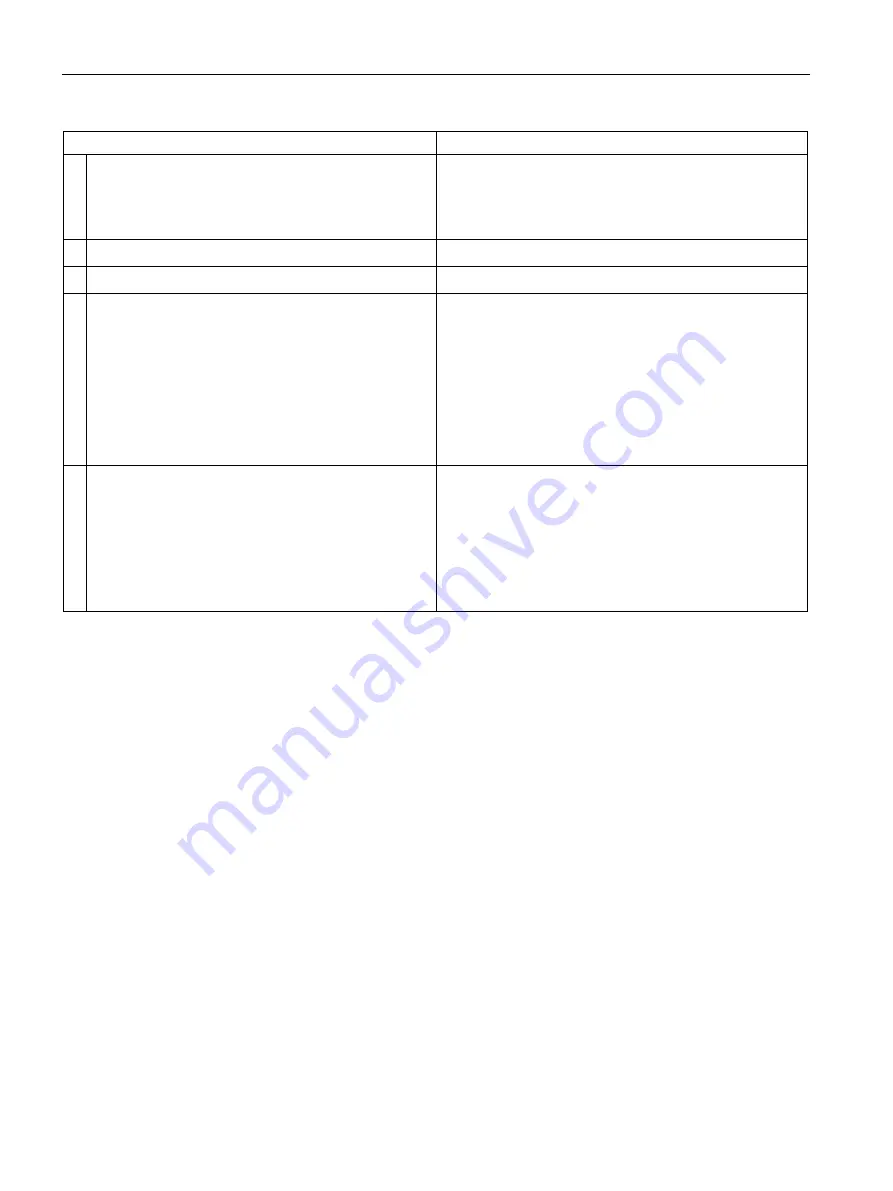
Main step
Sub step/comment
⑥
Configure the parameters for selected communication
protocol.
1.
Set RS485 address (p29004).
2.
Set baud rate (p29009).
3.
Set the command and setpoint source if you use Mod-
bus protocol (p29008).
⑦
Save the parameters and restart the drive.
⑧
Start transmitting.
⑨
Transmit the calibration status of the absolute encoder
to the PLC.
1.
Turn on the servo-on enable signal (SON).
2.
The PLC checks the standstill status and alarm status
through the digital output of the servo drive.
3.
If there is no alarm and the motor is in standstill status,
the PLC sends a data request to the servo drive through
the RS485 cable.
4.
In response to the data request from PLC, the servo
drive transmits calibration status (p2507[0]=3) of enco
d-
er to the PLC.
⑩
Transmit the absolute position data to the PLC.
1.
If the absolute encoder is calibrated, and meanwhile, the
servo drive is ready (the digital output RDY is logic 1)
and in standstill status (the digital output signal INP is
logic 1), the PLC sends a data request to the drive
through the RS485 cable.
2.
In response to the data request from the PLC, the servo
drive transmits the absolute position data (r2521) to the
PLC.







































































