





























Technical data
10.1 Technical data
SIMOTION C
178
Operating Instructions, 02/2012
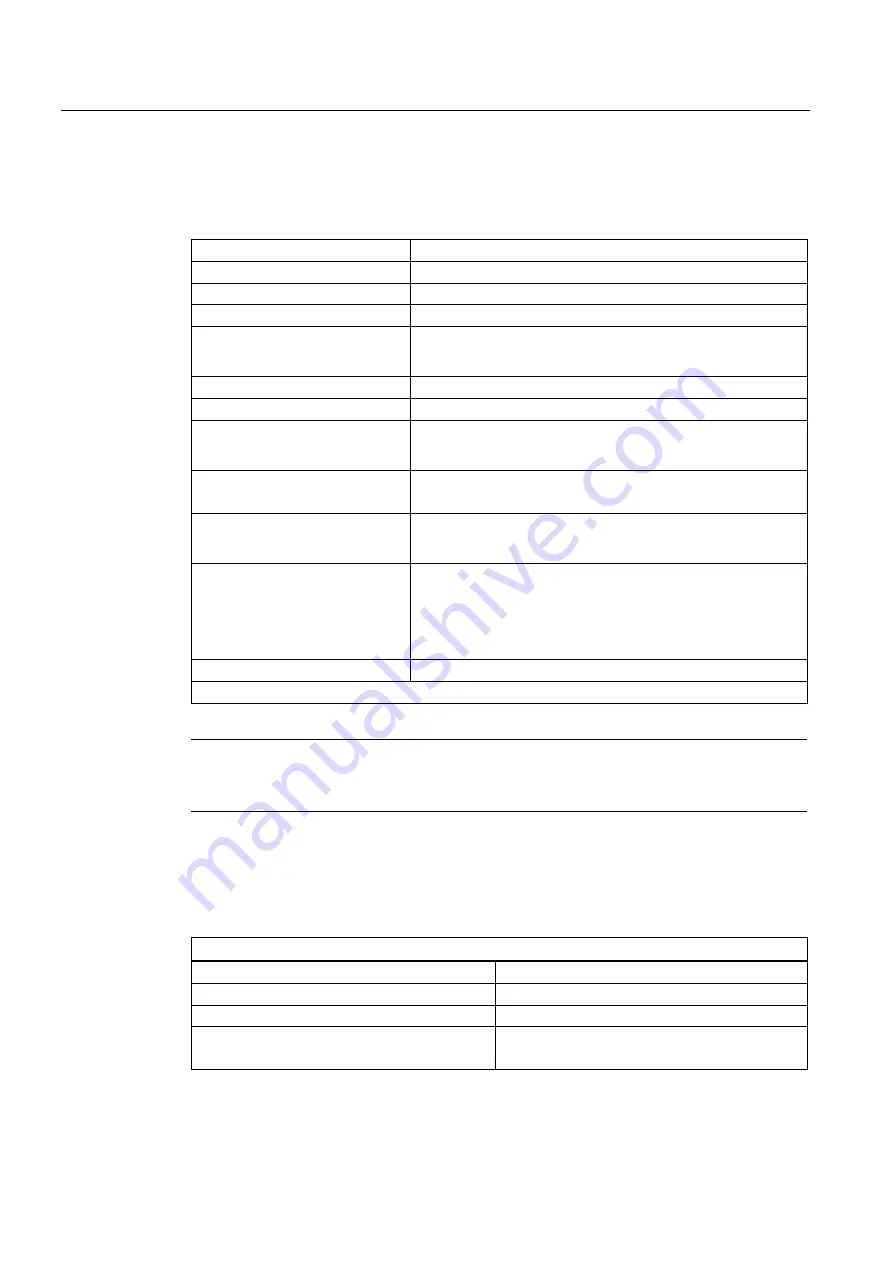
Digital outputs
Table 10- 13 Digital outputs
Number of outputs
8
Supply voltage
24 V DC (permissible range: V
L
= 20.4 to 28.8 V)
Output voltage
1 signal: From V
L1)
- 0.8 V to V
L1)
V
Max. output current
1 signal: 5 mA. to 0.6 A (via supply voltage)
Total current of the outputs
max. 4 A (at 0 to 40° C)
max. 2 A (at 40 to 55° C)
Extinguishing energy per output
400 mJ (not simultaneous)
Lamp load
5 W
Switching rate
100 Hz (with resistive load)
2 Hz (with inductive load)
Short-circuit protection
Max. leakage current
Yes
0 signal: 2 mA
Output delay (Q0...Q7)
0 → 1 signal: 500 μs (typically 150 μs) with RL = 60 Ohm
1 → 0 signal: 500 μs (typically 150 μs) with RL = 60 Ohm
Electrical isolation between
outputs
Electrical isolation between
outputs and logic
Insulation
No
Yes
500 V DC
Length of cable
Max. 30 m
1) V
L
- Supply voltage of outputs
Note
The connecting cable between the voltage source and the load current supply connector L+
and the associated reference potential M should not exceed a maximum length of 10 m.
READY output (RDY)
Table 10- 14 Electrical parameters of RDY relay contact
RDY relay contact
Switching voltage DC
max. 50 V
Switching current
Max. 1 A
Switching capacity
Max. 30 VA
Mechanical service life
Electrical service life
Usually 10
9
switching cycles
Typically 3 · 10
6
switching cycles at 24 V / 1 A







































































