





























- 789a -
Function diagram
8
7
6
5
4
3
2
1
fp_mc_789a_e.vsd
Free blocks
MASTERDRIVES MC
14.10.10
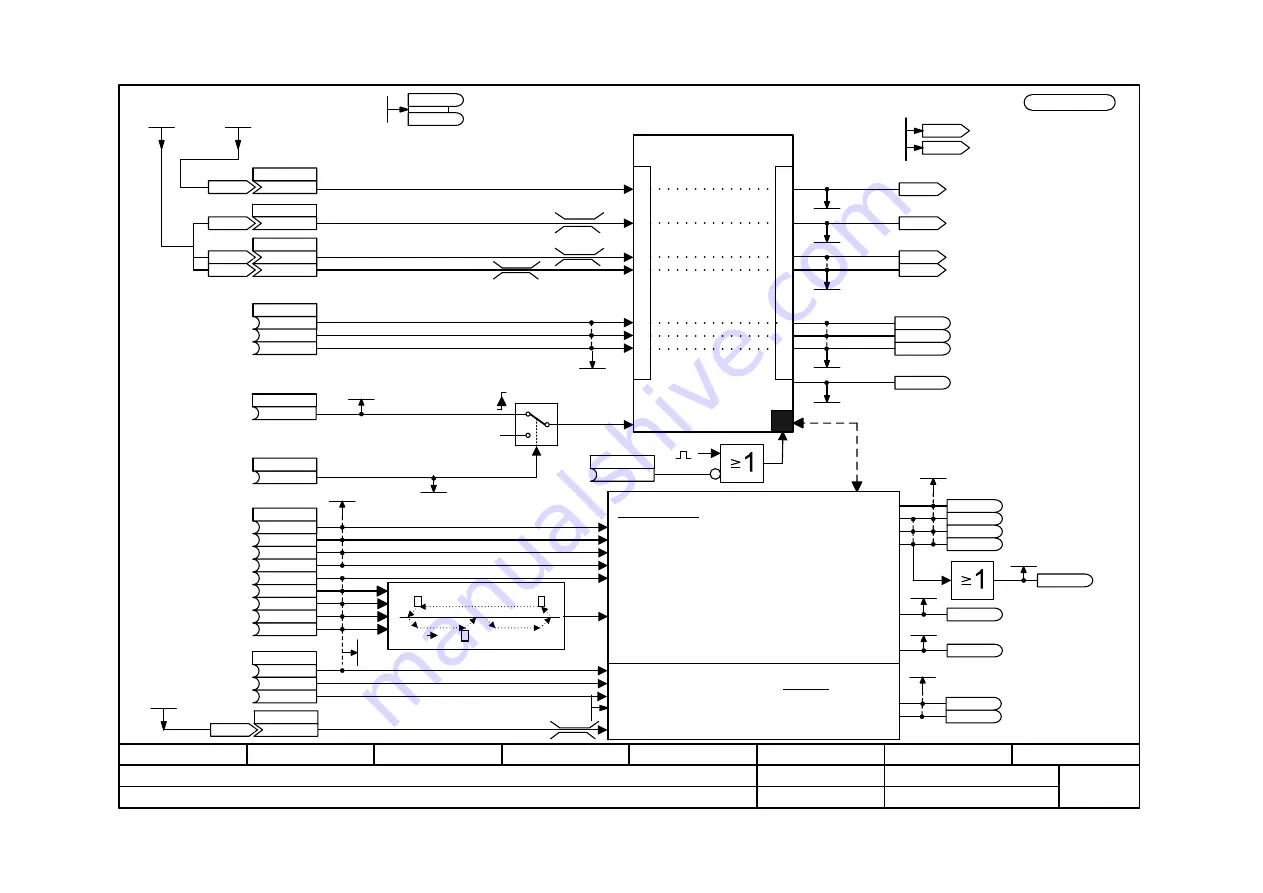
Basic Positioner: Setpoint Transfer and Mode Management
V2.5
SPV_RIE_TYP
POS_ON
REF_ON
SETUP_ON
B0220="Position control
enabled" [340.5]
ENABLE POS/REF
REF_BWD_STOP
REF_TYPE
REF_FWD_STOP
REF_STOP ([ARFD])
REF_D (0=Clockwise)
Valid
settin
gs
E
xisting
settin
gs
Position setpoint [LU]
Speed setpoint [%]
.1 Acceleration setpoint [%]
POS_TYP
D_FWD
D_BWD
RESET
(y=0)
SET
x
y
.05
.06
.07
Set Setpoint Transfer
Positioning type: 0 = Absolute / 1 = Relative
Direction selection: Forwards
Direction selection: Backwards
.09
1
Constant transfer
(NO relative position)
SPV_RIE
0
1
.08
.11
.12
.13
.14
.01
.02
.03
Mode management
- PRIORITY Modes:
STOP_Cam> Homing > Positioning > Setup
(The transitions occur "on the fly"; the priority always
applies, even with simultaneous mode selection;
"Homing on the fly" is always possible).
- REF_TYPE determines the type of homing, only
evaluated when edge of REF_ON is positive
(REF_ON starts homing).
- On switchover to "Constant set-setpoint-transfer"
(SPV_RIE_TYP = 1) all the above setpoint inputs are
are always immediately switched through.
- With "Constant set-setpoint-transfer" NO relative
postioning is possible (KK0874 (see above) is set to 0%).
.01 1= ENABLE basic positioner
Transfer type
Transfer
with pos. edge
Valid positioning type
Valid direction pos.
Valid direction neg.
POWER ON
0%
+200%
0%
+200%
0%
+200%
F
B
R
D
Sequence control
Go to home position
B
F
R
D
D_FWD = 1
SC_ON
SC_PLUS
SC_MINUS
Enable evaluation of STOP cam
STOP cam PLUS
STOP cam MINUS
.15
.16
.17
0%
+200%
Evaluation STOP cam:
(From V2.21)
After the enable, the limit switches act continually on the valid
modes to interlock the movements (V=0).
Static STOP cam (from V2.40):
In this mode overtravel of the cam is not supported which is why the
cams must be executed up to the end stop!
.1
U953.60=___ (20)
B0877
[PSR]
B0871
[REF] Homing on the fly
B0872
[POS] Positioning
B0873
[SETUP] Setup
B0870
Enable basic positioner
[ENABLE_POS_REF]
n870.1/0...3
B (878)
.02 1= Homing
B (879)
.03 1= Positioning
B (880)
.04 1= Setup
B (886)
.10 0= Homing on the fly / 1= Go to home position
B (1)
B (1)
B (888)
B (887)
Fixed binectors
Control word
U875.1...10 (0)
B0878...
Fixed binectors
B0887
K (878)
.2 Deceleration setpoint [%]
KK (879)
U867
B (881)
U866
Control word
B (882)
B (883)
Fixed connector
[%] setpoints
U873.1...3(100)
K0877
K0878
KK876
KK879
Fixed connector
position setpoints
U874.1(0)
K (877)
U869
n870.1/8
B (885)
U866
Control word
n870.1/7
B (220)
U866
Control word
n870.2/7
n870.2/0...3
K0886
Status word: Input setpoint / mode
n870.1
K0887
Status word: Output setpoint / mode
n870.2
B0874
[POS_TYP_ACT]
B0875
[D_FWD_ACT]
B0876
[D_BWD_ACT]
K0872
Valid acceleration setpoint [%]
K0873
Valid deceleration setpoint [%]
KK0874
Valid speed setpoint [%]
KK0875
Valid position setpoint [LU]
B0893
[REF_DRIVE]
Go to home position
n870.2/9
B0894
[SPV_RIE_ACKN] Acknowledge transfer
B0895
[REF_D]
n870.2/11
B (0)
U866
K0896
B (1)
B (1)
K (896)
U869.3
Deceleration setpoint 2 SC [ %]
Fixed connector [%]
Deceleration
setpoint 2 SC
U873.4(100)
B897
[SC_MINUS_ACTIV]
STOP cam MINUS active
B896
STOP cam PLUS active
[SC_PLUS_ACTIV]
n870.2/12..13
n870.1/9...14
BPos Mode Cam
U887 (0)
B (884)
U866
Control word
n870.1/4...6
B (1)
U882
Reset SET-SOLL
n870.2/10
n870.2/4...6
n871.1...2[%]
n860.1 [%]
n861.1 [LU]
KK (876)
U868
NOTE
If the basic positioner is enabled,
the following parameters can no
longer be changed:
U856, U857, U858 [FD789b]







































































