















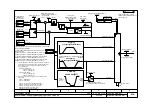
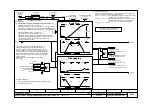
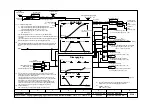
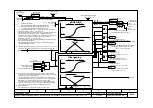











Function diagram
8
7
6
5
4
3
2
1
fp_mc_832_e.vsd
Technology option
MASTERDRIVES MC
03.03.08
virtual master axis
- 832 -
x1
x1 x2
100%
*
V_master_rated [832.7]
<2>
x2
0
1
1
0
.01 (0) [R_VM] RESET (V = 0)
.02 (1) [ST_VM] START/STOP (1=Start accel.)
.03 (0) [S_VM] Set virtual master axis to
initial position
V = 0
V = X
Virtual master axis
V
see [331.5]
The virtual master axis is an
independent free block and not inserted
in the positioning operating modes
Speed setpoint of virtual master axis
V<>0
|X| > |V|
V = X
|X| < |V|
Freeze V
± 2
31
- 1
[x 10 LU/min]
x1
*
x1 100%
x2
V_master_rated
[832.2]
x2
y
0 = Freeze ramp-function generator
Set position setpoint to zero
(Virtual master axis is
not calculated)
Speed setpoint of
virtual master axis
in
[% von U682]
[832.2]
<1> At U685=0, the ramp-function generator is out of force, and output V follows
input X undelayed. This is purposeful, for example, if you want to use the
comfort ramp-function generator with rounding on sheet [790] for the virtual
master axis. In this case you can also use the integrator on sheet [791]
Input speed ramp-function generator
t
X
Output speed ramp-function generator
t
V
Position setpoint of virtual master axis
t
ACL_V
S
0
S
ACL_V
ACL_V
V
ACL_V
0
t
SET
SET-
VAL
EN
S
(e.g. for SIMOLINK,
transmit words 1 und 2:
P751.01 = 817,
P752.02 = 817 [160.1])
Integrator
set S=initial position
V
Speed ramp-function generator
<2> Factory setting 1 228 800 corresponds to 3000 rpm at an axis
cycle length of ACL_V=4096 LU/rev. (e.g. set at MD23)
<3> Factory setting 204 corresponds to 1 s acceleration time at an
axis cycle length of ACL_V=4096 LU/rev
y
0 ... 2
31
- 1
[x 10 LU/min]
Master speed
0
<3>
<1>
A
B
C
D
A
B
C
D
V2.5
K
U681 (0)
Speed setpoint in [%]
Operating mode for setting
the speed setpoint
0 = specified in [% von V_master_rated]
1 = specified in [10 LU/min]
U683 (0)
KK0818
KK
U680 (818)
Speed setpoint
in [10 LU/min]
KK0815
n692
B
U684
Control signals
Virtual master axis
Acceleration
1 ... 2
31
- 1 [1000 LU/s2]
U685 (204)
U953.34 = ___(20)
KK0816
B0815
[FUR_VM] RFG running
B0816
Acceleration ramp active
B0817
Reference speed achieved
[VM_RSA]
B0818
Deceleration ramp active
B0819
Output=0
n691
KK0820
B
U689 (1)
Enable
virtual master axis
Axis cycle length of virtual master axis
(for rotary axis preferably set to number
LU per revolution of the master axis)
0 ... 2
31
- 1 [LU]
U687 (4096)
KK0817
Position setpoint of
virtual master axis
[LU]
n690
KK
U686 (819)
Setting value virtual master axis
KK0819
B
B
Rated master speed
0...2
31
– 1 [x 10 LU/min]
U682 (1 228 800)
-2
31
… +(2
31
-1) [LU]
U693 (0)
-2
31
… 2
31
-1
U679 (0)







































































