




























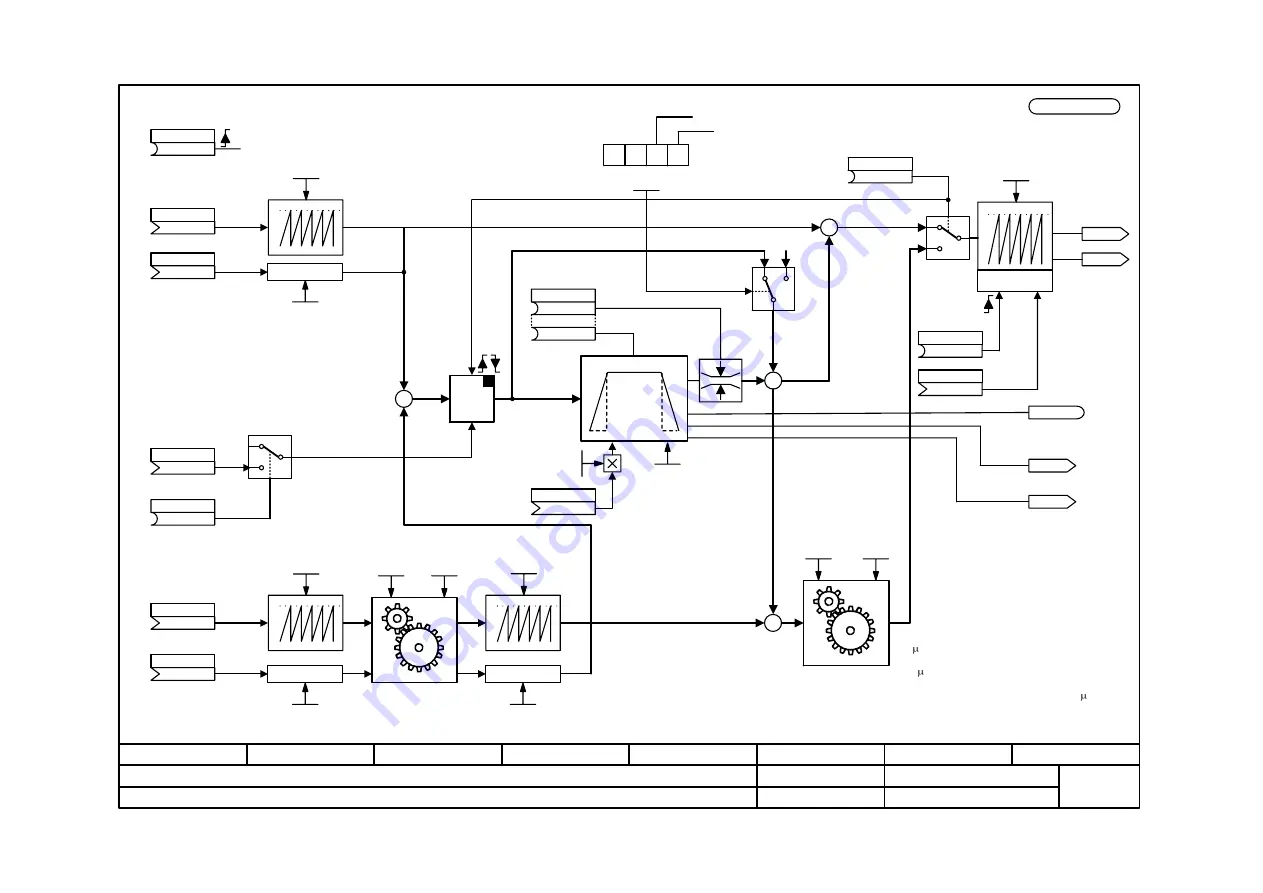
Function diagram
8
7
6
5
4
3
2
1
fp_mc_845_e.vsd
Technology Option
MASTERDRIVES MC
01.07.03
Master setpoint correction
- 845 -
V2.5
+
–
+
0
1
U953.50 = __ (20)
Function selection
Synchronization:
Output position is synchronized
to input position.
B
U452.6 (0)
Normalization
KK
U451.1 (0)
Src Master setpoint correction
Master setpoint 1
Axis cycle length
Master setpoint 1 [LU]
0...2
31
-1
U456.1 (4096)
Normalization speed master setpt 1
0.00 … 20000000.00 [1000 LU/min]
U455.3 (12288)
KK
U451.4 (0)
KK
U453 (826)
Offset of correction
B
U452.1 (0)
Trigger
KK
U451.2 (0)
Src Master setpoint correction
Master setpoint 2
KK
U451.5 (0)
Normalization
Normalization speed master setpt 2
0.00 … 20000000.00 [1000 LU/min]
U455.4 (12288)
Axis cycle length
Master setpoint 2 [LU]
0...2
31
-1
U456.2 (4096)
Numerator
U457.3 (1)
Denominator
U457.4 (1)
-32768 … 32767
Normalization
Axis cycle length
Master setpoint 2 [LU]
0...2
31
-1
U456.2 (4096)
Normalization speed master setpt 2
0.00 … 20000000.00 [1000 LU/min]
U455.3 (12288)
A
V-max.
A
V-Max.Corr.
[1000 LU/min]
0.00...20000000.00
U455.2 (60000.00)
KK
U454 (1)
Speed
adjustment [%]
Acceleration
[1000 LU/s2]
0.00...20000000.00
U455.1 (0.00)
B (1)
.5
B
U452.3 (0)
Enable
directional reversal
+
+
–
0
1
U458 (0)
E
Z
H
T
0/1/2/3 = w/out Sync / short path / pos. path / neg. path
0/1 = Master setpt corr. / Master setpt adj.
Numerator
U457.1 (1)
Denominator
U457.2 (1)
-32768 … 32767
<1>
0
1
B
U452.2 (0)
Master setpoint source
Master setpoint
changeover
KK0830
Master
setpoint [LU]
KK0837
V [%]
SET VALUE
SET
Axis cycle length
Master setpoint output [LU]
0 … 2
31
-1
U456.3 (4096)
B
U452.4 (0)
KK
U451.3 (0)
B0830
Master setpoint
correction active
KK0831
Resid. distance master
setpoint correction [LU]
KK0838
V [%]
<1>
Enable corr.
{Calculating time if master setpoint source U452.2(0)=0:
80 s}
{Calculating time if master setpoint source U452.2(0)=1:
100 s}
{Calculating time during position changeover from
master setpoint 1 to master setpoint 2: 145 s}
<1> Denominator = 0 => denominator = 1







































































