





























Function diagram
8
7
6
5
4
3
2
1
fp_mc_331_e.vsd
Position sensing
MASTERDRIVES MC
08.10.01
Configuration of position sensing for motor encoder in slot C
- 331 -
V2.5
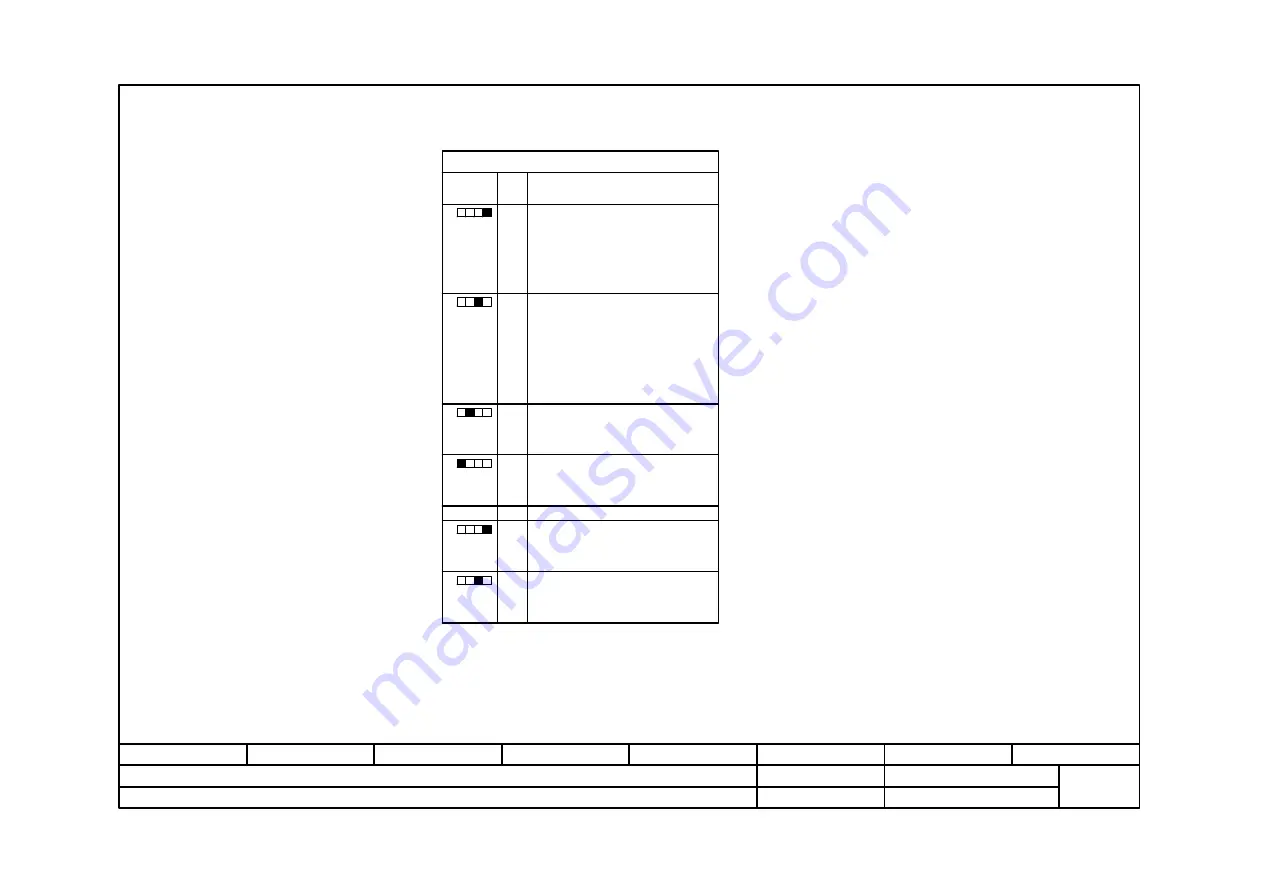
P183 Configuration of position sensing
Position of
P183.01
Value
Meaning
xxx
0
xxx
1
xxx
2
Encoder sensing
- No position sensing with motor encoder in
slot C
- Release position sensing with resolver
or encoder
- Release position sensing with multiturn
encoder
xx
0
x
xx
1
x
xx
2
x
Reference point detection mode
- No reference point detection
- At the right of the rough pulse
The first rotor zero position at the right of
the rough pulse sets position sensing to
the setting value
- The first rotor zero position at the left of
rough pulse sets position sensing to the
setting value
x
0
xx
x
1
xx
- Counting direction the same as direction
of motor rotation
- Counting direction opposite to direction
of motor rotation
0
xxx
1
xxx
- Input of position feedback scaling factor
with components left and right of decimal
- Input of position feedback scaling factor
as numerator/denominator
xxx
0
xxx
1
- Zero offset encoder
Zero offset correction OFF
- Zero offset correction ON
P183.02
xx
0x
xx
1x
- Reference point detection
Set position to setting value
- Reference point detection
Only measure position







































































