



























Advanced commissioning
6.18 Motor control
SINAMICS G115D distributed drive
Operating Instructions, 12/2020, FW V4.7 SP13, A5E48681219B-002
261
Settings that are required
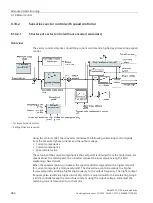
Restart quick commissioning and select the vector control in quick commissioning.
Quick commissioning (Page 106)
In order to achieve a satisfactory control response, as a minimum you must set the partial
functions – shown with gray background in the diagram above – to match your particular
application:
•
Motor and current model
: In the quick commissioning, correctly set the motor data on
the rating pl
ate corresponding to the connection type (Y/Δ), and carry out the motor data
identification routine at standstill.
•
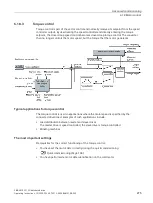
Speed limits
and
torque limits
: In the quick commissioning, set the maximum speed
(p1082) and current limit (p0640) to match your particular application
.
When exiting
quick commissioning, the converter calculates the torque and power limits corresponding
to the current limit. The actual torque limits are obtained from the converted current and
power limits and the set torque limits.
•
Speed controller
: Start the rotating measurement of the motor data identification. You
must manually optimize the controller if the rotating measurement is not possible.
WARNING
The load falls due to incorrect closed-loop control settings
For encoderless vector control, the converter calculates the actual speed based on an
electric motor model. In applications with pulling loads - e.g. hoisting gear, lifting tables or
vertical conveyors - an incorrectly set motor model or other incorrect settings can mean that
the load falls. A falling load can result in death or serious injury.
•
Correctly set the motor data during the quick commissioning.
•
Carry out the motor data identification.
•
Correctly set the "Motor holding brake" function.
Motor holding brake (Page 210)
•
For pulling loads, carefully comply with the recommended settings for vector control.
Advanced settings (Page 264)
Further information
For further information refer to the function diagrams 6040, 6050, and 6060 of the List
Manual.







































































