




























Advanced commissioning
6.18 Motor control
SINAMICS G115D distributed drive
Operating Instructions, 12/2020, FW V4.7 SP13, A5E48681219B-002
265
When droop is active, the ramp-function generators of all of the coupled drives must be set to
have identical ramp-up and ramp-down times as well as rounding-off.
Parameter
Description
Setting
r1482
CO: Speed controller I torque
output [Nm]
Display and connector output for the torque set-
point at the output of the I speed controller.
p1488[0...n] Droop input source
Sets the source for droop feedback.
0: Droop feedback not connected (factory setting)
1: Droop from the torque setpoint
2: Droop from the speed control output
3:
Droop from the integral output, speed controller
p1489[0...n] Droop feedback scaling
Sets the scaling for the droop feedback
A value of 0.05 means: At the rated motor torque,
the converter reduces the speed by 5% of the
rated motor speed.
Factory setting: 0.05
r1490
CO: Droop feedback speed reduc-
tion [rpm]
Displays the output signal of the droop calculation.
p1492[0...n] BI: Droop feedback enable
Enables the droop to be applied to the
speed/velocity setpoint.
Factory setting: 0
You can find additional information in the List Manual, function block diagram 6030.
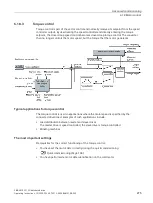
Special settings for a pulling load
For a pulling load, e.g. a hoisting gear, a permanent force is exerted on the motor, even
when the motor is stationary.
If you use encoderless vector control with a pulling load, the following settings are required:
•
Set the following parameters:
Parameter
Description
Setting
p1750[0...n] Motor model configuration
Sets the configuration for the motor model.
Bit 07 = 1: Use speed switchover limits that are
less sensitive to external effects.
p1610[0...n] Static torque setpoint (encoder-
less) [%]
Sets the static torque setpoint for sensorless
vector control in the low speed range.
Set a value which is higher than the maximum
load torque that occurs.
Factory setting: 50
•
When opening the motor holding brake, enter a speed setpoint > 0.
For speed setpoint = 0, and with the motor holding brake open, the load drops because
the asynchronous motor rotates with the slip frequency as a result of the pulling load.
•
Set the ramp-up and ramp-down times
≤
10 s in the ramp-function generator.







































































