





























Advanced commissioning
6.20 Overcurrent protection
SINAMICS G115D distributed drive
Operating Instructions, 12/2020, FW V4.7 SP13, A5E48681219B-002
281
Setting the dynamic braking
Parameter Description
Setting
p0219
Braking power of the
braking resistor [kW]
For p0219 > 0, the converter deactivates the VDC_max controller.
For vector control, p0219 defines the regenerative power
limit p1531.
Using p0219, you define the maximum braking power that
the braking resistor must absorb.
For an excessively low braking power, the converter extends
the motor ramp-down time.
Factory setting: dependent upon the nominal power of the drive
p0212.8
Power unit configuration
If necessary, reduce the activation threshold for the braking resistor.
p0210
Unit supply voltage [V]
Sets the drive supply voltage.
Factory setting: 400
An application example for configuring a drive with braking resistor is provided in the
Internet:
Engineering and commissioning series lifting equipment/cranes
https://support.industry.siemens.com/cs/ww/en/view/103156155
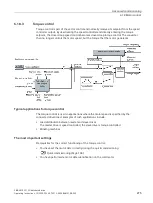
6.20
Overcurrent protection
Overview
The U/f control prevents too high a motor current by influencing the output frequency and
the motor voltage (I_max controller).
Requirement
You have selected U/f control.
The application must allow the motor torque to decrease at a lower speed.
Function description
The I_max controller influences the output frequency and the motor voltage.
If the motor current reaches the current limit during acceleration, the I_max controller
extends the acceleration operation.
If the motor load is so high during steady-state operation that the motor current reaches the
current limit, then the I_max controller reduces the speed and the motor voltage until the
motor current returns to the permissible range again.
If the motor current reaches the current limit during deceleration, the I_max controller
extends the deceleration operation.







































































