





























Operation
6.11 Communication via EtherNet/IP
Converter cabinet units
Operating Instructions, 07/2016, A5E03347396A
391
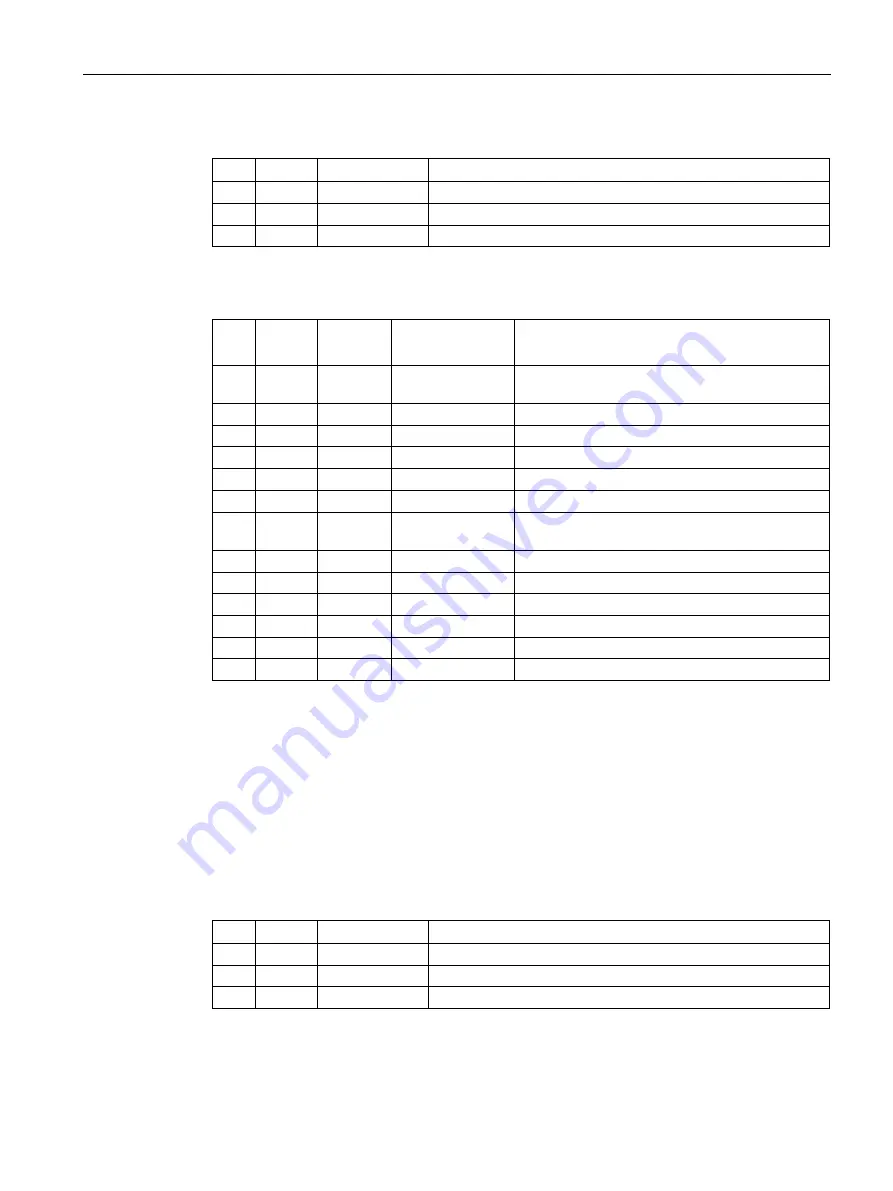
Table 6- 46 Class Attribute
No. Service
Type
Name
1
get
UINT16
Revision
2
get
UINT16
Max Instance
3
get
UINT16
Num of Instances
Table 6- 47 Instance Attribute
No.
Service
Type
Name
Value/explanation
2
get, set UINT16 Commisioning
state
p0010: commissioning parameter filter
3
get
INT16
Motor Type
p0300: motor type
6
get, set
REAL
Rated Current
p0305: rated motor current
7
get, set
REAL
Rated Voltage
p0304: rated motor voltage
8
get, set
REAL
Rated Power
p0307: rated motor power
9
get, set
REAL
Rated Frequency p0310: rated motor frequency
10
get, set
REAL
Rated Tempera-
ture
p0605: Mot_temp_mod 1/2 / sensor threshold and
temperature value
11
get, set
REAL
Max Speed
p0322: maximum motor speed
12
get, set UINT16 Pole pair number p0314: motor pole pair number
13
get, set
REAL
Torque Constant
p0316: motor torque constant
14
get, set
REAL
Inertia
p0341: motor moment of inertia
15
get, set
REAL
Base Speed
p0311: rated motor speed
19
get, set
REAL
Cos Phi
p0308: rated motor power factor
TCP/IP Interface Object, Instance Number: F5 hex
Supported services
Class
•
Get Attribute all
•
Get Attribute single
Instance
•
Get Attribute all
•
Get Attribute single
•
Set Attribute single
Table 6- 48 Class Attribute
No. Service
Type
Name
1
get
UINT16
Revision
2
get
UINT16
Max Instance
3
get
UINT16
Num of Instances
Summary of Contents for SINAMICS G150
Page 1: ......
Page 2: ......
Page 8: ...Foreword Converter cabinet units 8 Operating Instructions 07 2016 A5E03347396A ...
Page 18: ...Table of contents Converter cabinet units 18 Operating Instructions 07 2016 A5E03347396A ...
Page 679: ......
Page 680: ......







































































