





























Operation
6.14 Parallel operation of communication interfaces
Converter cabinet units
414
Operating Instructions, 07/2016, A5E03347396A
For example, the following applications are possible:
●
PROFIBUS DP for drive control and PROFINET for the acquisition of actual
values/measured values of the drive.
●
PROFIBUS DP for control and PROFINET for engineering only
●
Mixed mode with two masters (the first for logic and coordination and the second for
technology)
●
SINAMICS Link via IF2 (CBE20), standard telegrams and PROFIsafe via IF1
●
Operation of redundant communication interfaces
Assignment of communication interfaces to cyclic interfaces
With the factory setting p8839 = 99, the communication interfaces are permanently assigned
one of the cyclic interfaces (IF1, IF2), depending on the communication system, e.g.
PROFIBUS DP, PROFINET or CANopen.
The assignment to the cyclic interfaces can essentially be freely defined by user
parameterization for the parallel operation of the communication interfaces.
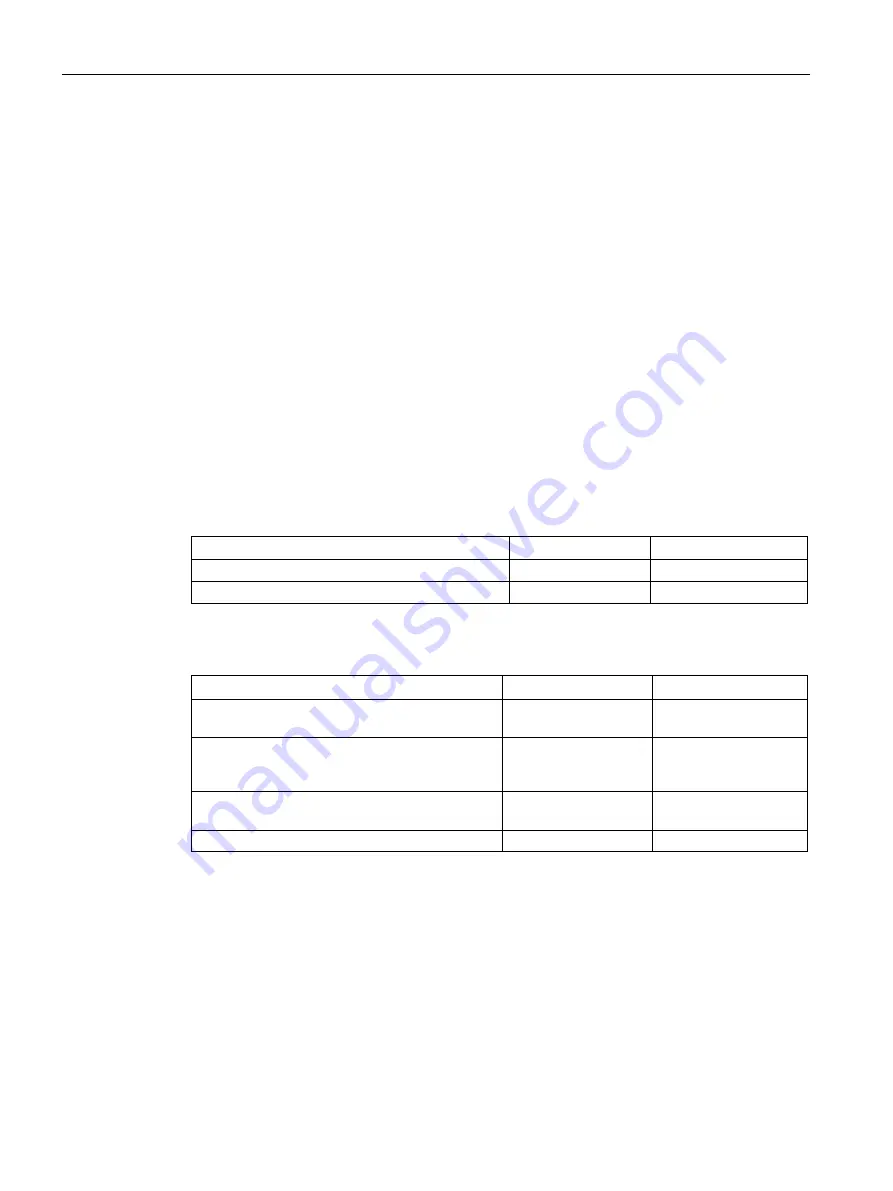
Table 6- 73 Properties of the cyclic interfaces IF1 and IF2
Feature
IF1
IF2
Setpoint (BICO signal source)
r2050, r2060
r8850, r8860
Actual value (BICO signal sink)
p2051, p2061
p8851, p8861
Table 6- 74 Implicit assignment of hardware to cyclic interfaces for p8839[0] = p8839[1] = 99
Inserted hardware interface
IF1
IF2
No option, only use Control Unit onboard interface
(PROFIBUS, PROFINET or USS)
Control Unit onboard
--
CU320-2 DP with CBE20 (optional PROFINET
interface)
COMM BOARD
Control Unit onboard
PROFIBUS or Control
Unit onboard USS
CU320-2 PN with CBE20 (optional PROFINET
interface)
Control Unit onboard
COMM BOARD
PROFINET
CAN option CBC10
Control Unit onboard
COMM BOARD CAN
Parameter p8839[0,1] is used to set the parallel operation of the hardware interfaces and the
assignment to the cyclic interfaces IF1 and IF2 for the Control Unit drive object.
The object sequence for process data exchange via IF2 depends on the object sequence
from IF1; see "List of drive objects" (p0978).
The factory setting of p8839[0,1] = 99 enables the implicit assignment (see table above).
An alarm is generated in case of invalid or inconsistent parameterization of the assignment.
Summary of Contents for SINAMICS G150
Page 1: ......
Page 2: ......
Page 8: ...Foreword Converter cabinet units 8 Operating Instructions 07 2016 A5E03347396A ...
Page 18: ...Table of contents Converter cabinet units 18 Operating Instructions 07 2016 A5E03347396A ...
Page 679: ......
Page 680: ......







































































