



























Setpoint channel and closed-loop control
7.4 Vector speed/torque control with/without encoder
Converter cabinet units
Operating Instructions, 07/2016, A5E03347396A
447
7.4.4
Speed controller
Both closed-loop control techniques with and without encoder (SLVC, VC) have the same
speed controller structure that contains the following components as kernel:
●
PI controller
●
Speed controller pre-control
●
Droop function
The torque setpoint is generated from the total of the output variables and reduced to the
permissible magnitude by means of torque setpoint limitation.
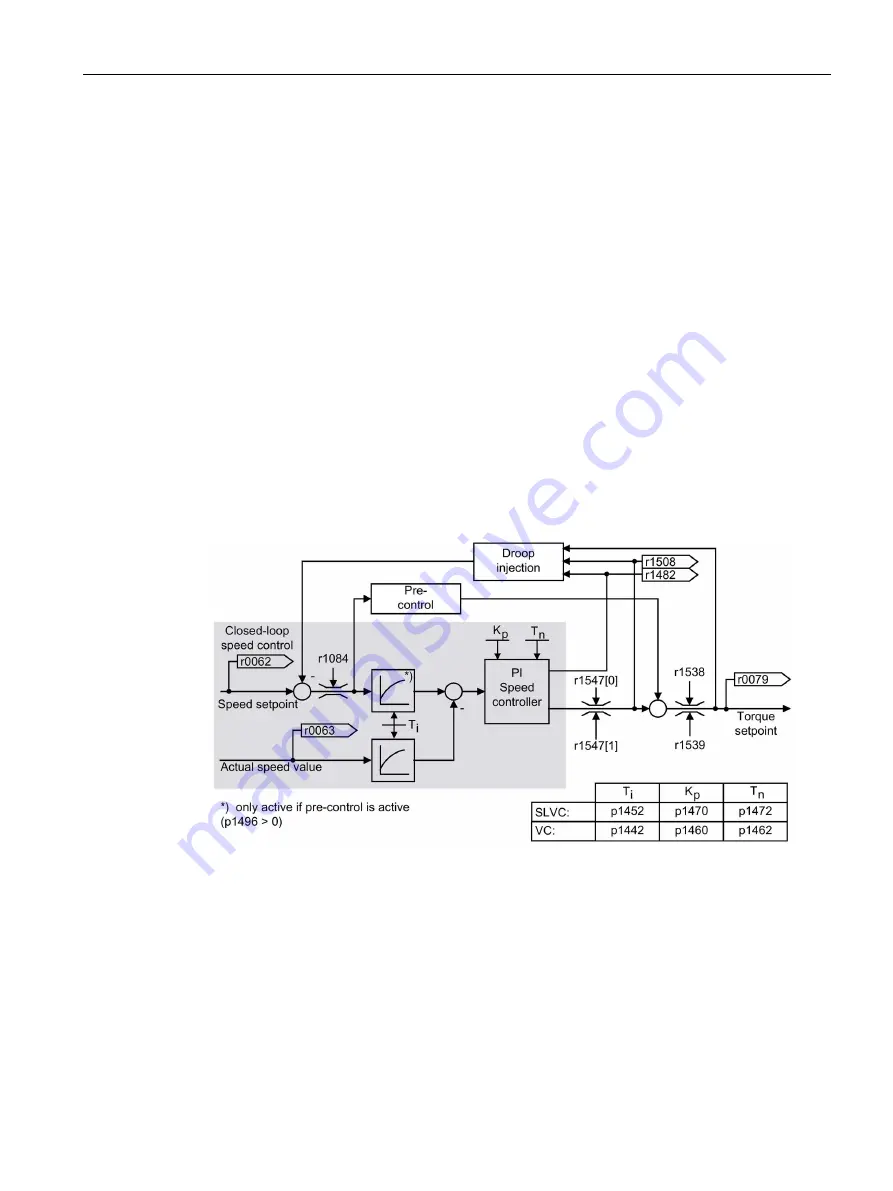
Function of the speed controller
The speed controller receives its setpoint (r0062) from the setpoint channel and its actual
value (r0063) either directly from the speed actual value encoder (vector control with
encoder) or indirectly via the motor model (encoderless vector control). The system
difference is increased by the PI controller and, in conjunction with the pre-control, results in
the torque setpoint.
When the load torque increases, the speed setpoint is reduced proportionately when the
droop function is active, which means that the single drive within a group (two or more
mechanically connected motors) is relieved when the torque becomes too great.
Figure 7-14 Speed controller
The optimum speed controller setting can be determined via the automatic speed controller
optimization function (p1900 = 1, rotating measurement).
If the moment of inertia has been specified, the speed controller (Kp, Tn) can be calculated
by means of automatic parameterization (p0340 = 4). The controller parameters are defined
in accordance with the symmetrical optimum as follows:
Tn = 4 x Ts
Kp = 0.5 x r0345 / Ts = 2 x r0345 / Tn
Ts = Sum of the short delay times (includes p1442 and p1452).
Summary of Contents for SINAMICS G150
Page 1: ......
Page 2: ......
Page 8: ...Foreword Converter cabinet units 8 Operating Instructions 07 2016 A5E03347396A ...
Page 18: ...Table of contents Converter cabinet units 18 Operating Instructions 07 2016 A5E03347396A ...
Page 679: ......
Page 680: ......







































































