





























Functions, monitoring, and protective functions
9.3 Extended functions
Converter cabinet units
556
Operating Instructions, 07/2016, A5E03347396A
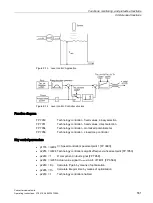
To transfer the motor back from the line supply, the sequence is simply reversed: At the start
of the process, contactor K2 is closed and contactor K1 is open.
●
The "Command bypass" control bit is canceled (e.g. by the higher-level automation).
●
The bypass function sets the control word bit "synchronizing".
●
The pulses are enabled. Since "synchronizing" is set before "pulse enable", the converter
interprets this as a command to retrieve the motor from the line supply.
●
Once converter synchronization to line frequency, line voltage and line phasing is
complete, the synchronization algorithm reports this state.
●
The bypass mechanism evaluates this signal and closes contactor K1. The signal is
evaluated internally - BICO wiring is not required.
●
Once contactor K1 has reported "closed" state, contactor K2 is opened and the motor
returns to operation on the converter.
9.3.2.2
Bypass with synchronizer without degree of overlapping (p1260 = 2)
Description
When "Bypass with synchronizer without degree of overlapping (p1260 = 2)" is activated,
contactor K2 (to be closed) is only closed when contactor K1 is opened (anticipatory type
synchronization). During this time, the motor is not connected to a line supply so that its
speed is determined by the load and the friction. Consequently, this bypass type is suitable
for drives with large moment of inertia (see following note).
Synchronization setpoint p3809 is used to correct a phase rotation in the signal sensing of
the voltage actual values (p3809 = -180 ° … 179.90 °). Furthermore, using this parameter,
the setpoint angle of the motor voltage can be set (in a range up to a maximum of 20 °el, see
p3813) to compensate for friction or load-dependent speed decrease during the bypass
switchover.
The phase position of the motor voltage before synchronization can be set using p3809 to
enable an "advance start" before the line supply to which synchronization should be
performed. As a result of the motor braking in the short time in which both contactors are
open, when closing contactor K2, a phase and frequency difference of approximately zero
must now be obtained.
If the angular difference is > 20 °el during switch-over, the current surges that cannot be
regarded as negligible would have to be anticipated. For this reason, synchronism is only
reached if the angular difference is
≤
p3813 (maximum of 20 °el). Compensating a speed
decrease using p3809 is only practical if the motor is evenly loaded during the switchover
period.
For instance, for conveyor belts, the load can also change during the bypass sequence,
depending on the process environment. If, during the switchover process, the angular
difference is more than 20 °el or if the load for each bypass operation differs, then the
"Bypass with synchronization with overlap (p1260 = 1)" mode must be used.
This bypass type requires a VSM10 Voltage Sensing Module that measures the line voltage
for the drive to be synchronized.
Summary of Contents for SINAMICS G150
Page 1: ......
Page 2: ......
Page 8: ...Foreword Converter cabinet units 8 Operating Instructions 07 2016 A5E03347396A ...
Page 18: ...Table of contents Converter cabinet units 18 Operating Instructions 07 2016 A5E03347396A ...
Page 679: ......
Page 680: ......







































































