





























Drive converter cabinet units
Operating Instructions, 07/07, A5E00288214A
259
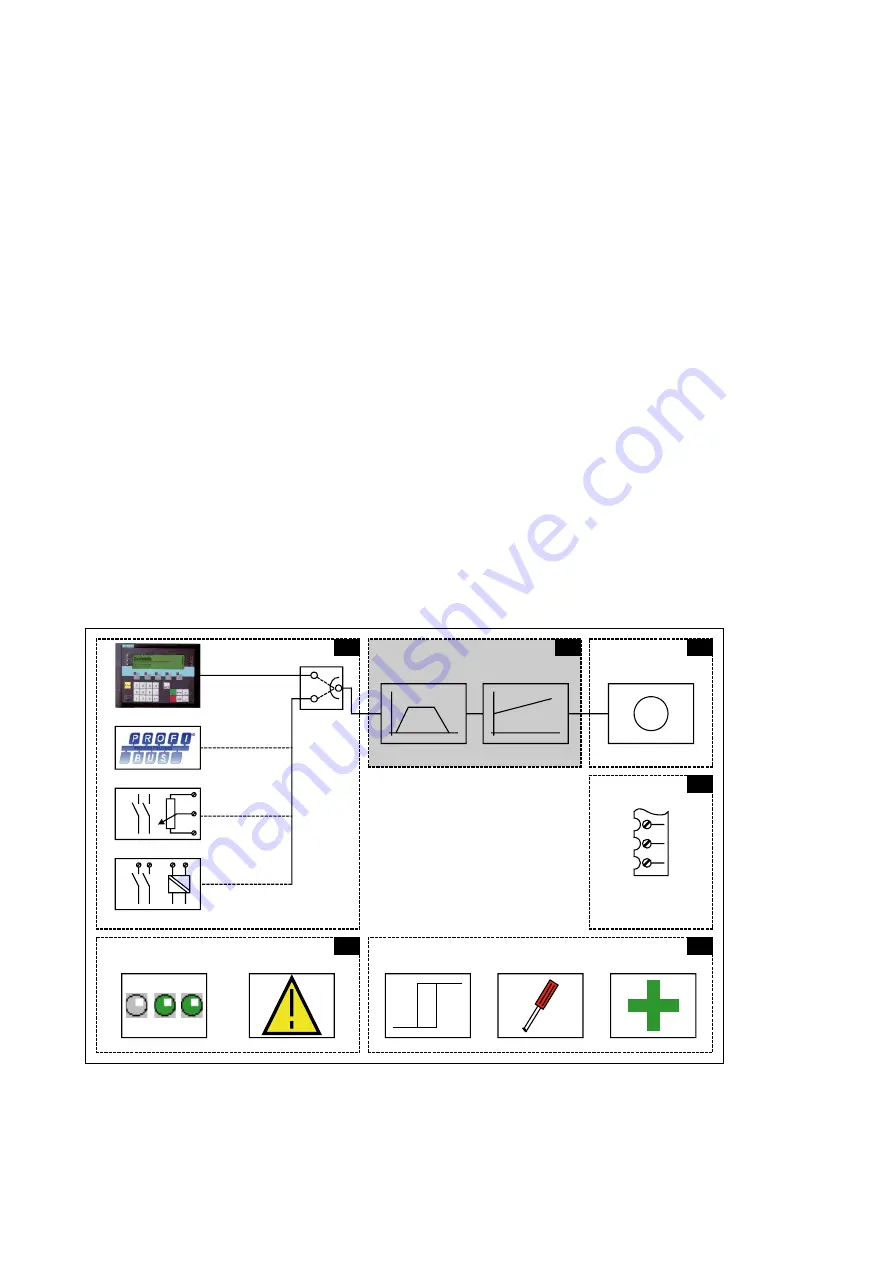
Setpoint channel and closed-loop control
7
7.1
Chapter content
This chapter provides information on the setpoint channel and closed-loop control functions.
●
Setpoint channel
–
Direction reversal
–
Skip speed
–
Minimum speed
–
Speed limitation
–
Ramp-function generator
●
V/f control
●
Speed control with / without encoder
M
~
-A60
5
7
6
8
9
10
3URWHFWLYHIXQFWLRQV
2XWSXWWHUPLQDOV
0RQLWRULQJIXQFWLRQV
)XQFWLRQV
)DXOWVDODUPV
'LDJQRVLV
1DPXUWHUPLQDOV;
,QSXWWHUPLQDOV$70
352),%86
&DELQHWRSHUDWRUSDQHO
6HWSRLQWFKDQQHO &ORVHGORRSFRQWURO







































































