





























Setpoint channel and closed-loop control
7.4 Vector speed/torque control with/without encoder
Drive converter cabinet units
280
Operating Instructions, 07/07, A5E00288214A
Note
The dynamic response may be insufficient if the specified current or torque limits are
reached during acceleration or deceleration.
7.4.3.2
Speed controller pre-control (integrated pre-control with balancing)
Description
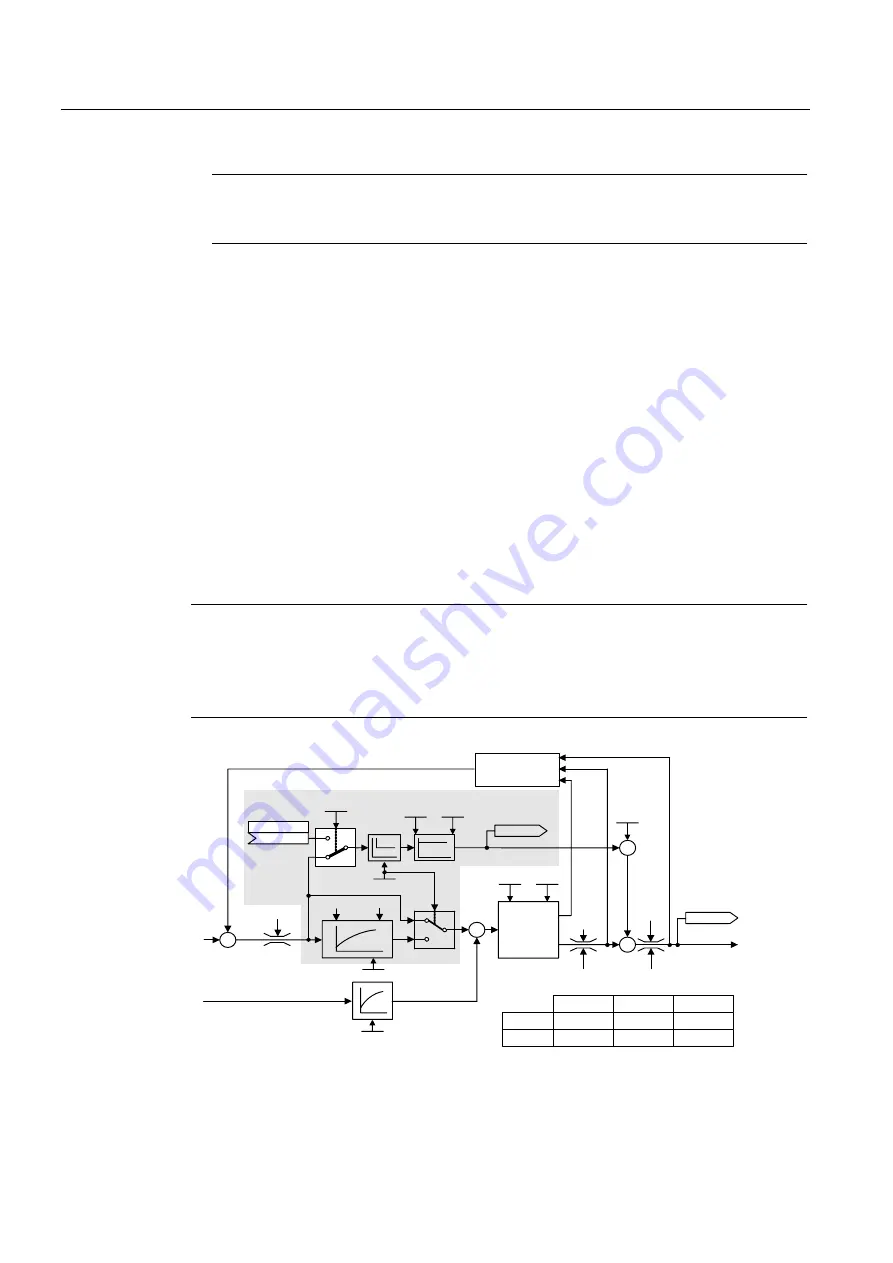
The command behavior of the speed control loop can be improved by calculating the
accelerating torque from the speed setpoint and connecting it on the line side of the speed
controller. This torque setpoint mv is applied to the current controller/the current controller is
pre-controlled using adaptation elements directly as additive reference variable (enabled via
p1496).
The torque setpoint (mv) is calculated from:
mv = p1496 x J x (dω/dt) = p1496 x p0341 x p0342 x (dω/dt), ω = 2πf
The motor moment of inertia p0341 is calculated when commissioning the drive system. The
factor p0342 between the total moment of inertia J and the motor moment of inertia must be
determined manually or by optimizing the speed controller.
Note
When speed controller optimization is carried out, the ratio between the total moment of
inertia and that of the motor (p0342) is determined and acceleration pre-control scaling
(p1496) is set to 100 %.
If p1400.2 = p1400.3 = 0, then the pre-control balancing is automatically set.
-
-
r 1547 [ 0 ]
r 1538
r 1547 [ 1 ] r
1539
r 1518
= 0
> 0
p 0341 p
0342
p 1496
SLVC :
VC :
p 1452
p 1442
p 1470
p 1460
p 1472
p 1462
K
p
T
n
K
p
T
n
r 1084
-
r 0079
T
i
T
)
2
i
T
)
2
i
0
1
p 1495
p 1400 . 2
p 1428
1 )
p 1429
1 )
r 1515
RQO\HIIHFWLYHZKHQS
RQO\HIIHFWLYHZKHQS
$FWXDOVSHHGYDOXH
6SHHGVHWSRLQW
$FFHOHUDWLRQSUHFRQWURO
$FFHOHUDWLRQSUHFRQWURO
3,
6SHHG
FRQWUROOHU
7RUTXH
VHWSRLQW
'URRS
LQMHFWLRQ
Figure 7-11 Speed controller with pre-control







































































