




























Functions, monitoring, and protective functions
9.3 Drive functions
Drive converter cabinet units
Operating Instructions, 07/07, A5E00288214A
309
9.3.1.1
Standstill measurement
Description
Motor identification with p1910 is used for determining the motor parameters at standstill
(see also p1960: speed controller optimization):
●
Equivalent circuit diagram data p1910 = 1
●
Magnetization characteristic p1910 = 3
For control engineering reasons, you are strongly advised to carry out motor identification
because the equivalent circuit diagram data, motor cable resistance, IGBT on-state voltage,
and compensation for the IGBT lockout time can only be estimated if the data on the type
plate is used. For this reason, the stator resistance for the stability of sensorless vector
control or for the voltage boost with the V/f characteristic is very important.
Motor identification is essential if long supply cables or third-party motors are used. When
motor data identification is started for the first time, the following data is determined with
p1910 = 1 on the basis of the data on the type plate (rated data):
●
Equivalent circuit diagram data
●
Total resistance of:
–
Power cable resistance (R
cable
) and
–
Stator resistance (R
S
)
●
IGBT on-state voltage/compensation for the IGBT lockout time
Since the type plate data provides the initialization values for identification, you must ensure
that it is entered correctly and consistently (taking into account the connection type
(star/delta)) so that the above data can be determined.
If the resistance of the motor supply cable is known, you are advised to enter this value
before the standstill measurement (p0352) so that it can be subtracted from the total
measured resistance when the stator resistance (p0350) is calculated.
Entering the cable resistance improves the accuracy of thermal resistance adaptation,
particularly when long supply cables are used. This governs behavior at low speeds,
particularly during encoderless vector control.
FDEOH
FDEOH
)UHTXHQF\
FRQYHUWHU
0RWRU
&DEOHDQG
VHULHVLQGXFWDQFH
VHULHV
&
5
/
˰ 6
/
˰ 5
/
0
5
5
5
6
S
S
S>0@
S>0@
S>0@
/
S>0@
S>0@ S>0@
S>0@
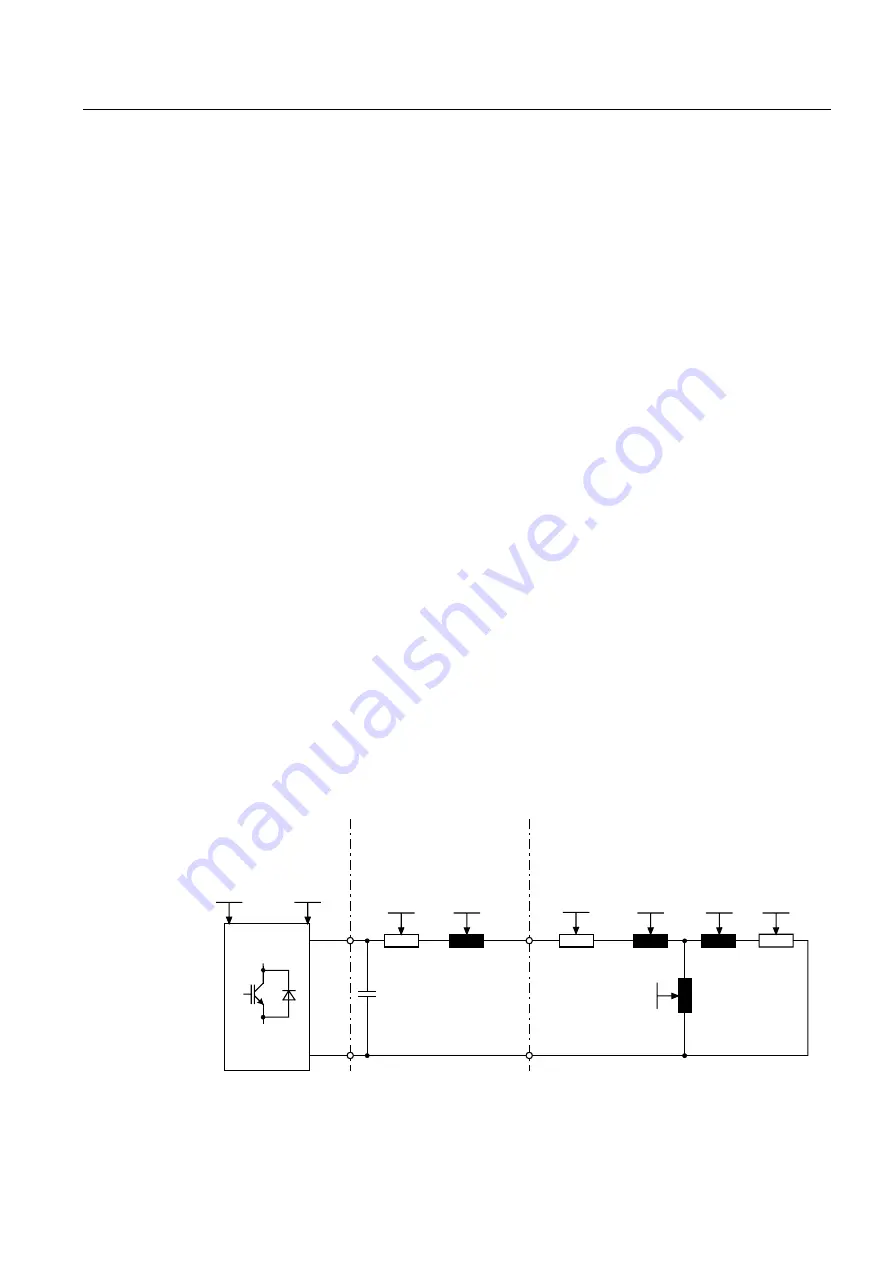
Figure 9-1
Equivalent circuit diagram for induction motor and cable







































































