





























NC Commissioning with HMI Advanced
11.5 Axes and spindles
Manual
Commissioning Manual, 05/2008, 6FC5397–4CP10–4BA0
415
Checking the loop gain
If a KV factor is already known for the machine type, then this factor can be set and checked.
For the test, one reduces the acceleration of the axis via the following machine data to
ensure that the drive does not reach its current limit during the acceleration and deceleration
operation:
●
MD32300 $MA_MAX_AX_ACCEL (axis acceleration)
The Kv factor must also be checked for high speeds of the rotary axis and spindle (e.g. for
spindle positioning, tapping).
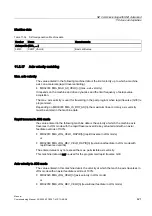
The approach behavior at various speeds can be checked by means of a storage
oscilloscope or the HMI Advanced servo trace software. The speed setpoint is recorded for
this purpose.
VHOHFWHG.
Y
IDFWRU
ZHOO
VHOHFWHG.
9
IDFWRU
EDGO\
W>PV@
>9@
Q
VROO
W>PV@
>9@
Q
VHWO
Figure 11-17 Speed setpoint characteristic
No overshoots may occur while the drive is approaching the static states; this applies to all
speed ranges.
Overshoot in the position control loop
The reasons for an overshoot in the control loop can be:
●
Acceleration too high (current limit is reached)
●
Rise time too long (re-optimization necessary)
●
Mechanical backlash
●
Mechanical components canted
For safety reasons, set the Kv factor to a little less than the maximum possible value.
The real Kv factor must precisely match that set because monitoring functions are derived
from the Kv factor that would otherwise respond (e.g. contour monitoring).
Acceleration
The machine axes are accelerated and braked with the values entered in the following
machine data:
●
MD32300 $MA_MAX_AX_ACCEL (axis acceleration)
This value should allow the axes to be accelerated and positioned rapidly and accurately
while ensuring that the machine is not unduly loaded.







































































