


























06.03
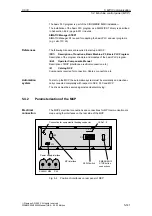
5.4 Machine control panel (MCP)
5-146
Siemens AG, 2003. All rights reserved
SINUMERIK 840Di Manual (HBI) – 06.03 Edition
Notice
Block FC 19 or FC 25 is part of the basic PLC program. It is the user’s (ma-
chine manufacturer’s) responsibility to call the block correctly and/or assign the
interface the appropriate parameters.
For a detailed description of FC 19 and FC 25, please refer to:
/FB1/
Description of Functions, Basic Machine: P3, Basic PLC Program
Section: FC 19: MCP_IFM Transmission of MCP signals tointerface
Section: FC 25: MCP_IFT Transfer of MCP/OP signals tointerface
5.4.4
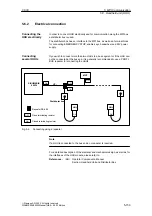
Example: Connecting an MCP to SINUMERIK 840Di
1. Connect the MCP electrically.
Use the terminating resistor integrated in the MPI connector according to the
general rules for connecting components to the MPI bus.
Since function block FB1 is not yet parameterized in the basic PLC program,
communication with the PLC does not yet take place and all LEDs on the
MCP front panel flash.
2. Checking the software version
Simultaneously pressing the keys “Feed stop” and “Feed enable” displays
the software version using the LEDs located on the front side.
3. Parameterizing function block FB 1 (editing the FB 1 parameters in OB 100
using the SIMATIC Manager STEP7)
The MCP will be parameterized as the first and only MCP as an example:
MCPNum:
INT:= 1;
// one MCP is connected
// P# = pointer to
MCP1In:
P#E 0.0;
// address of input data (8 bytes)
MCP1Out:
P#A A 0.0;
// address of input data (8 bytes)
MCP1StatSend:
P#A 8.0;
// address of the send status data (4 bytes)
MCP1StatRec:
P#A 12.0;
// address of receive status data (4 bytes)
MCP1BusAdr:
INT:= 6;
// default address
MCP1Timeout:
S5TIME:= S5T#700MS; // should be kept
MCP1Cycl:
S5TIME:= S5T#200MS; // should be kept
MCPMPI:
BOOL:= FALSE;
// MCP/HT 6 is operated at the “extended”
// MPI bus
MCP1Stop:
BOOL:= FALSE;
MCP1NotSend:
BOOL:= FALSE;
4. Insert block FC 19 or FC 25 into the cyclic part of the PLC program
(see Fig. 5-6).
References
5 MPI Communication







































































