




























06.03
13.4
Frequency response measurement
13-427
Siemens AG, 2003. All rights reserved
SINUMERIK 840Di Manual (HBI) – 06.03 Edition
13.4.3
Position control loop measurement
This measurement function basically analyses the response to the motor posi-
tion measuring system. If the function is activated for a spindle without position
measuring system, the NCK will generate an error message. Depending on
which basic measurement setting has been selected, various measurement
parameters lists as described below are made available.
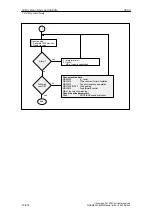
1. Set the traversing range monitoring function and enabling logic in the main
menu.
One of three different types of measurement can be selected:
S
Reference frequency response
S
Setpoint step change
S
Setpoint ramp
2. Set the required parameters in the measurement parameter screen.
3. Display of the measurement result on the screen with the soft key Display.
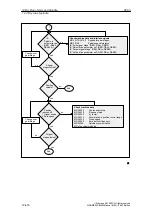
The reference frequency response determines the transmission response of the
position controller in the frequency (active position measuring system). The set-
point filters, K
v
value and feedforward control must be parameterized such that
resonance is avoided wherever possible over the entire frequency range. In the
case of dips in the frequency response, the setting of the feedforward control
balancing filters should be checked. Excessive resonance requires:
1. Decrease of the K
v
value
2. Decrease of the feedforward control value
3. Use of setpoint filters.
The effects of these measures can also be checked in the time range.
Functionality
Procedure
Measurement:
Reference
frequency
response
13 Drive Optimization using HMI Advanced







































































