

























Project Planning Manual
SIPART DR20
X1
INT
+
INT
gn
SP - w
w
i
w
w
w
i
w
a
w
e
T
w
X
0
0
0 0
S20, S21
Display
Key
8
8
8
4
+
-
SES
W
X
Xd
0
2
1
S23
A2
A1
a1
a2
S17
x - tracking
Key
Key
13
8
8
8
0
1
0
1
S19
8
8
8
8
A
A
A = H or N or Bl or Si
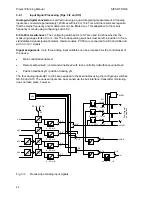
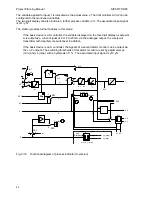
Fig. 3/4
Processing of command variable and formation of the negative deviation with a fixed
setpoint
controller
•
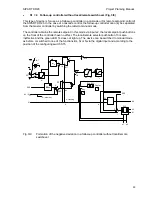
S1 = 1 Fixed setpoint controller with disturbance variable feed-forward at the input
(Fig. 3/5)
The constant c1 (zero offset) and the disturbance variable x2(r) which can be apportioned using c2
are added to the main controlled variable x1 (r, 1) which can be processed further as the controlled
variable x:
x = x1 + c1 + c2
∗
x2
The calculation is made between 0 and 100 %. The constants c1 and c2 can be set as parameters
between -199.9 % (corresponds to number -1.999) and +199.9 % (corresponds to number
1.999).
The effective controlled variable x is displayed in the selected measuring range LA to LE.
If only "dynamic disturbance variable feed-forward" is required, the constant c2 is set to 0 and the
input variable x2 applied directly to the D element via configuring switch S27 (see Section 3.2.3
- D element).
28







































































