




























Functions
6-102
7SJ63 Manual
C53000-G1140-C120-1
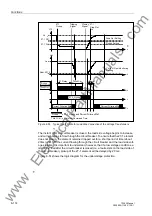
The short time delays associated with fault protection elements do not allow sufficient
time for the orderly curtailment of load by operating personnel. In addition, fault pro-
tection elements set to trip for overload will not allow short-duration, non-damaging
overloads – a practice which is often required in real operating situations.
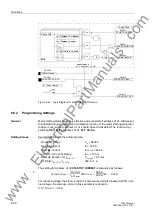
The 7SJ63 protective relay features an thermal overload protective function with a
thermal tripping characteristic curve which may be adapted to the overload tolerance
of the equipment being protected.
Thermal overload protection may be switched
21
or
2))
or
$ODUP2QO\
at address
)&7
. If switched
21
, tripping is also possible.
k–Factor
The nominal device current is used as a basis for overload detection. The program-
mable
.²)$&725
(set at address
) is calculated as the ratio of the thermally-per-
missible continuous current I
max
to the nominal device current I
N
:
The thermally-permissible continuous current for the equipment being protected is
known from manufacturer’s specifications. The thermal overload function is normally
not applicable to aerial lines since the actual current capability of aerial lines is depen-
dent on factors that are generally unknown (e.g. wind speed, ambient temperature,
etc.). For cables, the permissible continuous current is dependent on the cross-sec-
tion, insulating material, design, and the cable routing, among other things. It may be
taken from pertinent tables, or is specified by the cable manufacturer. If no specifica-
tions are available, a value of 1.1 times the nominal current rating is assumed.
When determining the nominal current rating of the protected equipment, it is impor-
tant to relate this current to the nominal current rating of the device. For example, the
maximum permissible continuous current for a motor and the nominal current rating of
the motor are given in primary amperes.
For the k factor to be set based on the nominal device current, the following equation
must be used:
Example: Motor and current transformer with the following data:
where
I
max prim
Maximum permissible continuous motor current in primary
amperes
I
N Motor
Nominal motor current in primary amperes
I
N CT prim
Current transformer primary nominal current
Permissible Continuous Current:
I
max prim
= 1.2 ·
I
N
Motor Nominal Current
I
N Motor
= 1100 A
Current Transformer Ratio
1200 A/1 A
k
I
max
I
N
-----------
=
k
I
max prim
I
NMotor
---------------------
I
NMotor
I
N CT prim
------------------------
⋅
=
Set the
.²)$&725
Set Value K-FACTOR
1.2
1100 A
1200 A
-------------------
⋅
1.1
=
=
www
. ElectricalPartManuals
. com







































































