


























Functions
100
7SS52 V4 Manual
C53000-G1176-C182-3
5.1.1.5
Algorithm with Filtered Values
The protection logic eliminates any DC components in the differential current by cal-
culating its fundamental wave. This increases the accuracy in the case of relatively
small, offset differential currents and reduces the protection tripping times.
The value of the differential current fundamental wave is determined by means of sine
and cosine filters. The stabilizing current is calculated on the basis of the summated
rectified mean values of the feeder currents.
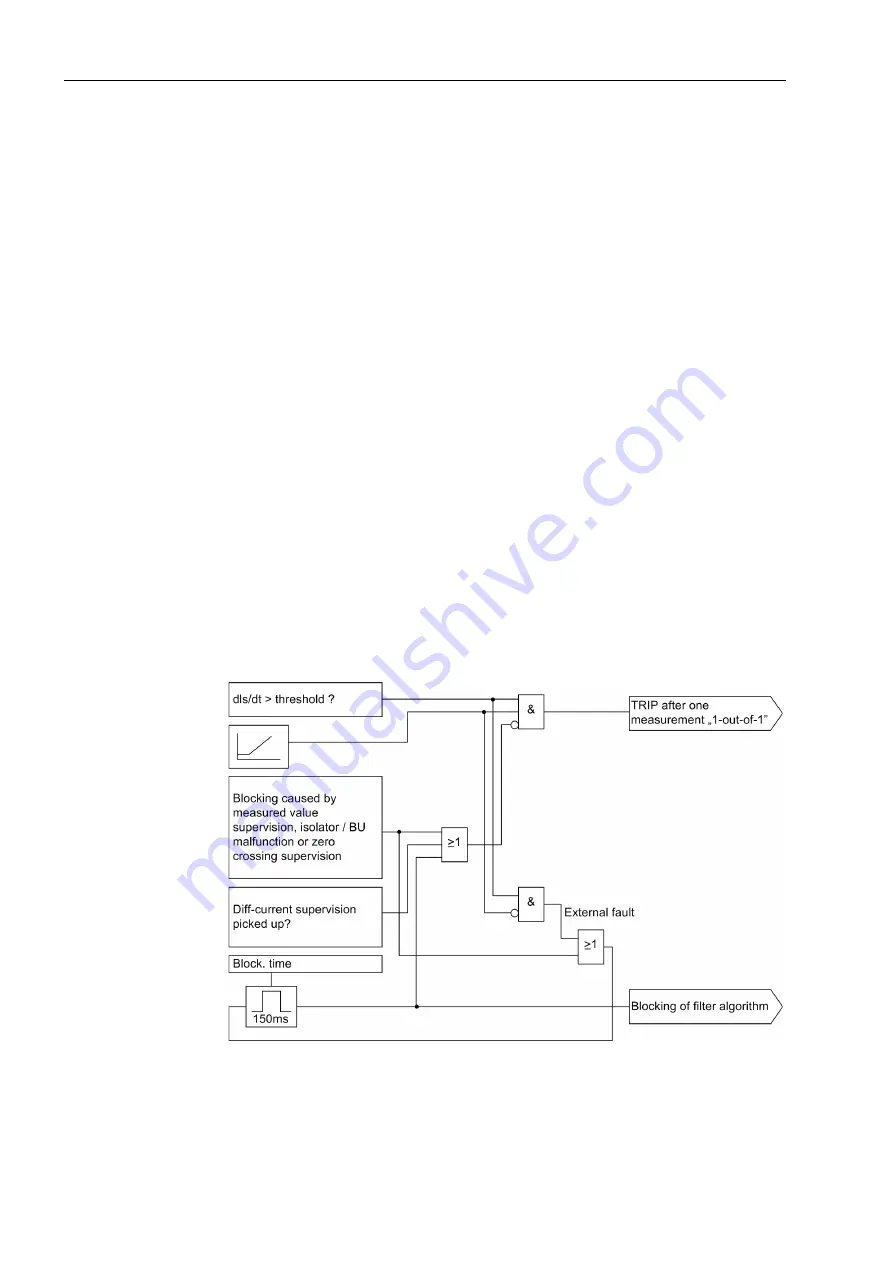
This part of the algorithm makes also use of the characteristics described in Chapter
5.1.1.2, page 94. The filter algorithm operates in parallel to the instantaneous values
algorithm, so that both algorithms can initiate a trip independently of one another. In
the presence of an external fault, the filter algorithm is blocked for 150 ms by the in-
stantaneous values algorithm to avoid the risk of spurious tripping in case of highly sat-
urated differential currents (see also Figure 5-8, page 101).
5.1.1.6
Summary of the Measuring Method
The measuring method of the busbar protection can be summarized as follows:
Tripping occurs when
•
I
d
>
set limit and
•
I
d
>
k
×
I
s,mod
and
•
release from ”1-out-of-1”, ”2-out-of-2” or filter algorithm
The measuring method is illustrated in Figures 5-6, page 100, 5-7, page 101 and 5-8,
page 101.
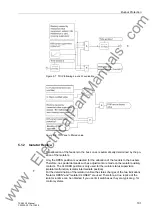
Figure 5-6 TRIP following 1-out-of-1 evaluation
www
. ElectricalPartManuals
. com






































































