




























Operation
20221495F
23
26
24
22
20
18
16
14
12
10
8
6
4
2
0
LO
res
pon
se p
ara
me
ters
HI r
esp
ons
e p
ara
me
ters
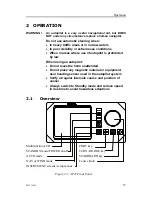
Transition Speed set to 9 Knots
Transition to LO parameters
with increasing speed: 10 Knots
Transition to HI parameters
with decreasing speed: 8 Knots
Speed
Sailboat
When sailing in WIND mode, the parameters are automatically
changed by the direction of the wind as per below or by the boat
speed.
The transition between HI and LO parameters and vice versa
will have a different characteristics with regards to the wind
angle compared with the transition controlled by the speed of the
boat.
If you loose too much speed e.g. when tacking, the parameters
will change to HI to gain sufficient rudder response. This should
be observed when setting the transition speed on sailboats.
2.10
Manual Selection of HI/LO Parameters
Manual selection of HI/LO parameters is necessary if there is no
speed input to the autopilot or if you want to override the
automatic control.
To toggle between LO and HI parameters, press the "AUTO"
button two times quickly.
Summary of Contents for AP25
Page 1: ...MANUAL SIMRAD AP25 Autopilot 20221495F Sw 1 3 English ...
Page 2: ......
Page 48: ...Simrad AP25 Autopilot 46 20221495F 1 2 4 3 7 5 6 8 Figure 2 2 Wind steering ...
Page 66: ...Simrad AP25 Autopilot 64 20221495F This page is intentionally left blank ...
Page 140: ...Simrad AP25 Autopilot 138 20221495F This page is intentionally left blank ...
Page 172: ...Simrad AP25 Autopilot 170 20221495F wind vane steering 41 Z zigzag turn 27 55 ...







































































