



























34
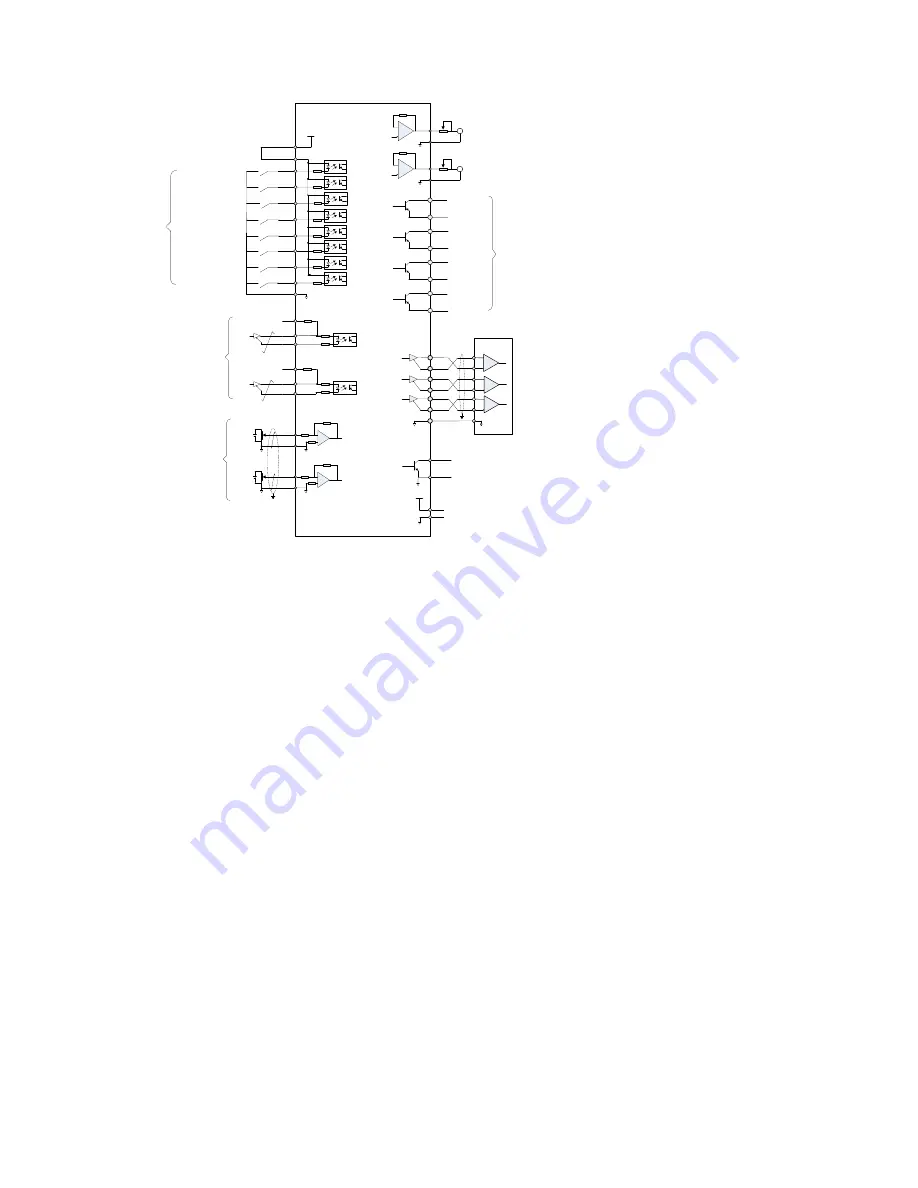
4.8 Standard wiring diagram for control circuit
4.8.1 Position control mode standard wiring diagram
100Ω
PULSE+
PULSE-
33
34
SIGN+
SIGN-
31
32
16
PULHIS
PULS
[CW A phase]
SIGN
[CCW B phase]
Position
instruction
8
23
37
38
9
24
39
10
DO1
DO1-
DO2
DO2-
DO3
DO3-
DO4
DO4-
Status
output
Encoder Dividing
pulse output -
Difference
PE
PA+
PA-
PB+
PB-
PZ+
PZ-
28
13
12
27
26
GND
29
11
35
42
Upper
computer
GND
Encoder Z-phase
open-collector output
GND
OCZ
+5V
+5V
GND
6
43
GND
AO1
Analog 1 output
Analog 2 output
15
29
30
29
GND
GND
AI2
AI1
1
EA100
Servo drive
Servo ready
Brake output
Location arrival
Fault output
Torque
limit
PE
Torque limit 0 ~ 10V
Input impedance : 9kΩ
Torque limit -10 ~ 0V
Input impedance: 9kΩ
In 5V power supply,
the maximum allowable
current 200mA
PULHIP
+24V
+24Vpower supply
25
COM+ 21
DI1
5
DI2
20
4
DI3
19
3
18
2
DI4
DI5
DI6
DI7
17
DI8
ALM-RST
INHIBIT
P-OT
N-OT
GNUMO
GNUM1
S-ON
P-CLR
COM
State
input
7
Servo enable
Alarm reset clear
Pulse deviation counter clear
Pulse inhibit
Forward driving inhibit
Reversal driving
inhibit
Electronic gear ratio numerator
selection 0
Electronic gear ratio numerator
selection 1
S-RDY
BK
COIN
ALM
2KΩ
2KΩ
A
GND
AO1
A
100Ω
100Ω
100Ω
Figure 4-24 standard position mode control circuit wiring diagram
4.8.2 Speed Control Mode Standard Wiring Diagram







































































