




























52
Parameters
Function
Initial
value
Unit
Applicable
control
mode
Pr
op
er
ty
Commu
nication
Address
P
S
T
origin and
regard ORGP terminal signal
(Function
No. 22) as coarse reference origin.
3: Reverse direction to search the origin
and
regard ORGP terminal signal
(Function
No. 22) as coarse reference origin.
4: Forward to search Z-phase pulse
origin
directly
5: Reverse to search Z-phase pulse
origin
directly
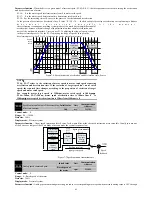
PB-04
Back to zero first section high speed
0
rpm
√
√
√
○
2B04H
PB-05
Back to zero second section low speed
100
rpm
√
√
√
○
2B05H
PB-06
High 5 of origin return offset pulse
0
rev
√
√
√
○
2B06H
PB-07
Low 4 of origin return offset pulse
0
ppr
√
√
√
○
2B07H
PB-08
Whether clear the position deviation
after origin return
0: Do not clear
1: Clear
0
-
√
√
√
○
2B08H
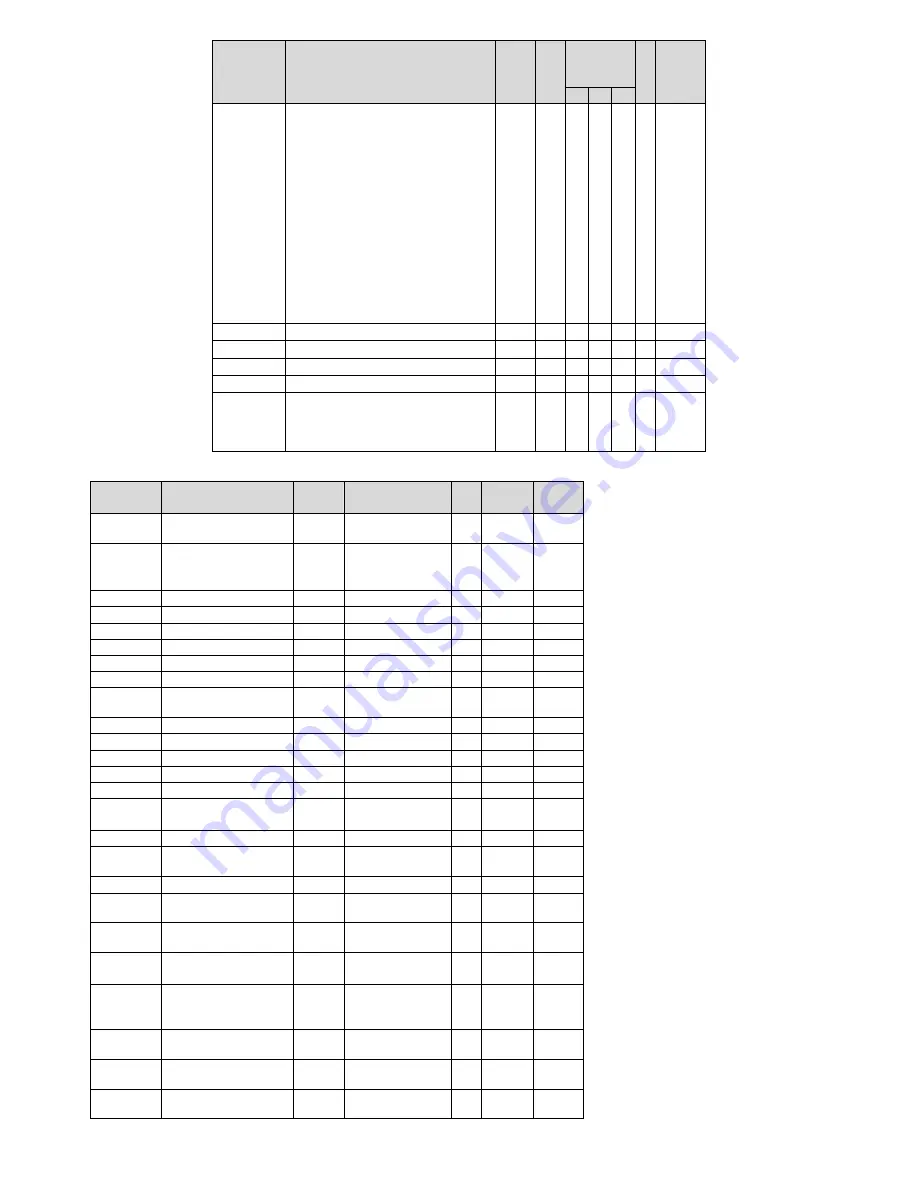
6.2.11 PE group - motor parameters
Parameters
Function
Default
value
Settings ranges
Unit
Property
Run
mode
PE-00
Motor
parameter
password
0
0-65535
-
■
P S T
PE-01
Motor Codes
Related
motor
code
120-8000
■
P S T
PE-02
Motor rated power
0. 0
0. 0
~
6553. 5
KW
■
P S T
PE-03
Motor rated current
3. 00 0. 01
~
100. 00
A
■
P S T
PE-04
Motor rated torque
2. 40 0. 1
~
100. 00
N. m
■
P S T
PE-05
Motor rated voltage
220V 220
~
380
V
■
P S T
PE-06
Rated motor speed
3000 10
~
9000
rpm
■
P S T
PE-07
Motor maximum speed
5000 10
~
9000
rpm
■
P S T
PE-08
Motor
number
of
pole-pairs
4
1
~
360
■
P S T
PE-09
Q axis inductance
3. 0
0. 01
~
655. 35
mH
■
P S T
PE-10
D axis inductance
3. 0
0. 01
~
655. 35
mH
■
P S T
PE-11
Resistance between lines 3. 920 0. 001
~
65. 535
Ω
■
P S T
PE-12
Torque coefficient
1. 59
0. 01
~
655. 35
-
■
P S T
PE-13
Not used
PE-14
Encoder rotor inertia
0. 12
0. 01
~
655. 35
Kg*c
m
2
■
P S T
PE-15
Encoder type
0
0
~
4
-
■
P S T
PE-16
Encoder pulses per
revolution
2500
512
~
30000
ppr
■
P S T
PE-18
Encoder electrical angle
15.0
0. 0
~
359. 9
°
■
P S T
PE-19
Encoder rising electrical
angle of U phase
80. 5
0. 0
~
359. 9
°
■
P S T
PE-20
Motor autotuning method
setting
0
0
~
2
-
□
P S T
PE-21
Absolute encoders using
method selection
0
0: Incremental encoder
1: Absolute encoder
-
■
P S T
PE-22
Incremental encoder AB
phase sequence
relationship
0
0: A leads B CCW
1: A leads B CW
-
■
P S T
PE-23
Q axis current regulator
proportional gain
8000
-
-
○
P S T
PE-24
D axis current regulator
proportional gain
8000
-
-
○
P S T
PE-25
Q axis current regulator
integral gain
13000
-
-
○
P S T







































































