





























64
S curve
acceleration
peroid
S curve
uniform
acceleration
peroid
S curve
deceleration and
acceleration
peroid
Uniform
peroid
Motor
rated
speed
T
PACC
t
1
t
3
t
2
T
PL
T
PL
T
PACC
Linear
acceleration
t
4
t
6
t
5
T
PL
T
PL
T
PDEC
T
PDEC
S curve
deceleration
peroid
S curve
uniform
deceleration
peroid
S curve
acceleration and
deceleration
peroid
Linear
deceleration
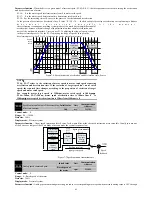
Figure7-4 Internal position instruction acceleration and deceleration time
、
S curve smoth
In the figure, linear acceleration is acceleration and deceleration curve of motor when P1-14=0.
When P1-14 isn‘t 0
,
motor accelerates and decelerates according to S curve amongT
PL
(
P1-14
)
.From 0 speed to motor rated speed required
total acceleration time is T
PACC
+T
PL
,
from motor rated speed to 0 speed required total deceleration time is T
PDEC
+T
PL
。
The purpose of S curve is making movement instruction to carry on the smoothing processing, avoiding system produces too much quick
jump(differential of acceleration) because of drastic change of input instruction, thus stimulates vibration and noise of the mechanical
structure.
NOTE
:
P1-12
、
P1-13 refers to the variation of motor speed is motor rated speed requiring
acceleration and deceleration time. If the variation of target speed isn’t motor rated
speed, the required time changes according to the proportion of variation of target
speed and motor rated speed.
For example, motor target speed is 1500rpm
,
motor rated speed is 3000rpm
,
P1-12=200ms
,
P1-13=300ms
,
motor speed acceleration time is 100ms from 0 to
1500rpm
,
motor speed deceleration time is 150ms from 1500rpm to 0.
P1-15
External pulse command smoothing filter
time constant
Initail value
Unit
Communicatio
n
Address
0
ms
210FH
Control mode
:
P
Range
:
0
~
30000
Data size
:
16bit
Display mode
:
Decimal system
Parameter function
:
The time constant for external pulse signal to smooth filtering .when set
0 ,it‘s invalid.
The function of parameter is making
input pulse instruction smoothing, but will be
delay phenomenon. Commonly used
in :
accelerate and deceleration
;
PC haven‘t the function of
Electronic gear is large
;
low
;
Instruction
frequency
is
jump
、
unstable phenomenon and so on when
It occurs to
advanced step
motor runs.
P1-16
Speed command acceleration timeT
SACC
Initail value
Unit
Communication
Address
200
ms
2110H
P1-17
Speed command deceleration time T
SDEC
Initail value
Unit
Communication
Address
200
ms
2111H
P1-18
Speed command S curve smoothing time
T
SL
Initail value
Unit
Communication
Address
50
ms
2112H
Control mode
:
S
Range
:
P1-16
、
P1-17
为
0
~
30000
,
P1-18
为
0~2000
Data size
:
16bit
Display mode
:
Decimal system
Pulse
instruction
frequency
Before the
filtering
After the
filtering
0
t
63.2%
P1-15
Figure7-5 External pulse command
smoothing
filter time constant







































































