
















Disorientation:
During flight if you get disorientated, do not panic. But leave the sticks to center and switch to GPS position hold mode.
Quad will hold its position. Try to figure out if Quadcopter is facing away for facing to you, you can use Channel 4 (rudder)
to yaw and see if you can figure out quadcopter rear or nose. It will be easier for you to fly it back if you re-establish
orientation.
Normally it is easier to find qudcopter rear, due to rear LEDs on the Quadcopter. In case you are too far, and can’t
designate rear from front, then simply switch on IOC and now you can easily use Elevator and Aileron channels and bring
the quadcopter back to you. Once you re-establish your orientation you can turn IOC off and start flying in normal mode.
The easiest way in such situation when you lost orientation due to quadcopter flying two far for your eyesight, is to
activate the Auto return to home feature.
Altitude control malfunction
In case Quadcopter shows erratic behavior and bad altitude hold, jumps up and down itself, please land immediately and
check the gains settings using assist program for FreeX.
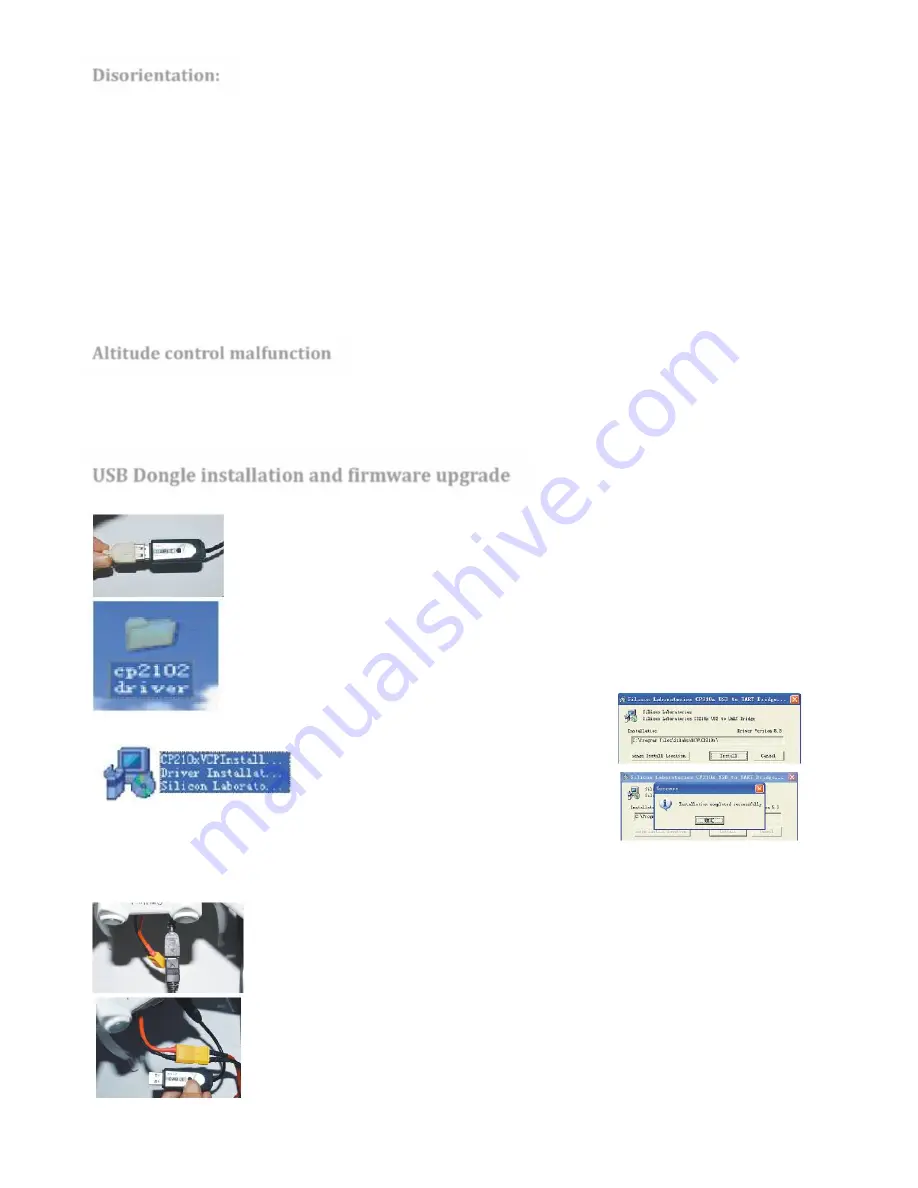
USB Dongle installation and firmware upgrade
1 : First connect USB to your Quadcopter and then to your computer
2 : Open the drivers folder cp2102 driver
3: Click CP210xVCPInstaller.exe and click install
4: Click OK to complete the installation
Note: If you cannot use USB driver to work, please check the PC Device Manager, and COM port settings. Choose the right
COM port.
Firmware Upgrade Procedure
Connect FreeX to your USB Dongle
Press and hold the button on USB dongle and connect the battery to Quadcopter. You can see
USB dongle will have three LED flashes, now release the button.
Summary of Contents for FREE X
Page 1: ......
Page 4: ......
Page 5: ...www freexgroup com FREE X FREE X FREE X...
Page 6: ...FREE X...
Page 7: ...FREE X FREE X FREE X FREE X...
Page 8: ......
Page 9: ...FREE X...
Page 11: ...FREE X FREE X FREE X FREE X...
Page 12: ...FREE X...
Page 13: ...FREE X...
Page 15: ...1...
Page 16: ......
Page 17: ......































































