





















13
/
22
Copyright (c) 2016-2017 Shanghai Slamtec Co., Ltd.
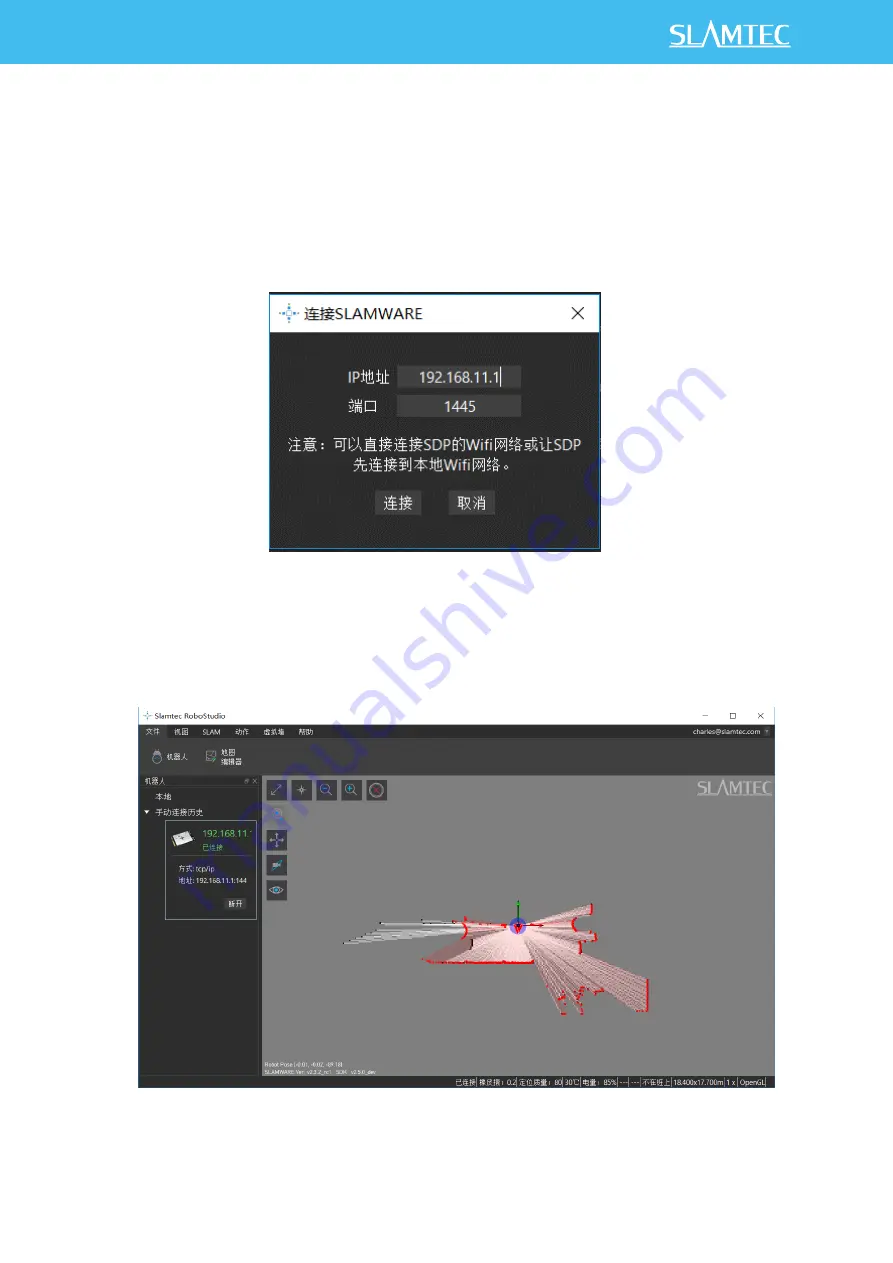
Right click the whitespace of the robot list -> choose
manual connect robot
in
the prompt dialog box, -> enter the IP address and port number in the new dialog
box -> click
Connect
to connect to the robot as shown in the following screenshot.
If you have already connected to the SSID obtained in step 3 via network adapter
on computer, please enter the default IP address 192.168.11.1 in the above dialog
box. (The IP address of your wireless adapter network should be DHCP mode)
Figure 4-3 RoboStudio Robot Connection Dialog Box
Once connected successfully, the major work area will show the robot, map
information and its status. The robot name will turn to green and the robot status
will turn to
Connected
as below.
Figure 4-4 RoboStudio Robot Connection
Right click a point in the place where you want to build a map, and Apollo will
follow the point to build map. After mapping, add virtual walls to the places where





































































