


























- 10 -
3.2 I/O signal connection for each mode
The example of connecting driver's I/O signal is shown.
3.2.1 Position control mode (Sink I/O interfaces)
(1) Connection example
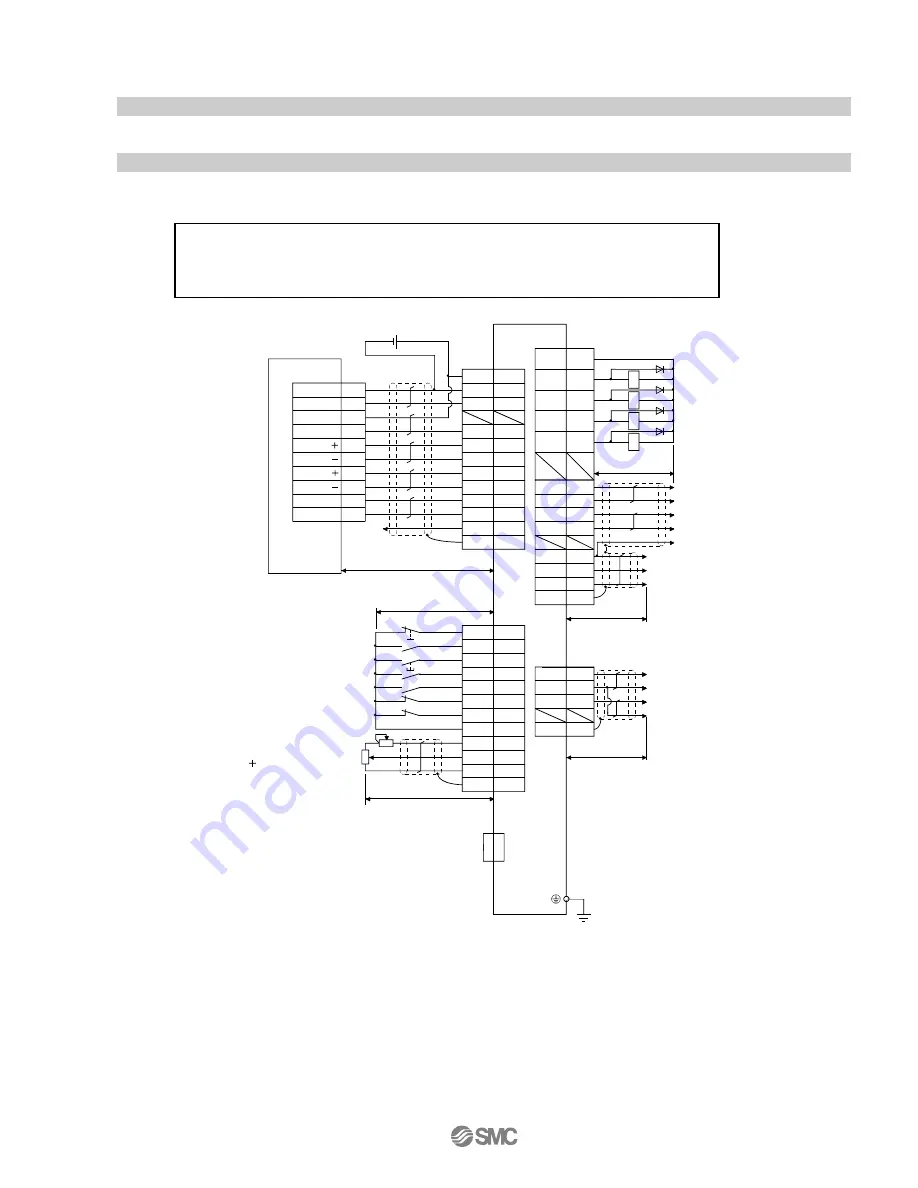
A connection example of the position control mode is shown below. Connect wires if necessary.
(Note 12)
Plate
Plate
Servo amplifier
3
1
2
(Note 7)
CN6
(Note 2)
Trouble (Note 6)
Zero speed detection
Limiting torque
Encoder A-phase pulse
(differential line driver)
21
DICOM
48
ALM
23
ZSP
25
TLC
24
INP
4
LA
5
LAR
6
LB
7
LBR
34
LG
33
OP
1
P15R
SD
10m max.
2m max.
Encoder B-phase pulse
(differential line driver)
Control common
Encoder Z-phase pulse
(open collector)
(Note 7)
CN1
LG
DICOM
10m max. (Note 8)
41
20
46
49
10
11
35
9
3
36
CLEARCOM
12
15
16
14
13
11
CLEAR
RDYCOM
READY
PULSE F
PULSE F
PG0
PG0 COM
PULSE R
PULSE R
18
10
17
9
DOCOM
CR
RD
PP
PG
NP
NG
LZ
LZR
8
(Note 11)
(Note 7)
CN1
QD75D
Positioning module
24VDC
In-position
(Note 4, 12)
Control common
SD
RA1
RA2
RA3
RA4
Plate
(Note 1)
2m max.
10m max.
Upper limit setting
42
15
19
17
18
43
44
47
1
27
SD
EMG
SON
RES
PC
TL
LSP
LSN
DOCOM
P15R
TLA
LG
28
(Note 7)
CN1
Emergency stop
Servo-on
Reset
Proportion control
External torque limit selection
Forward rotation stroke end
Reverse rotation stroke end
(Note 3, 5)
(Note 5)
(Note 10)
USB cable
(option)
(Note 9)
MR Configurator
CN5
Analog torque limit
10V/max. torque
Personal
computer
(Note 12)
Plate
MO1
LG
MO2
SD
2m max.
Analog monitor 1
Analog monitor 2
Refer to
“LECSB Operation Manual”, section 3.2 for wiring details.
Refer to
“
LECSB Operation Manual (
Simplified Edition)”, section 3.2.1 (2) and (3) for input/output signal details.
This is the wiring example using PLC of Mitsubishi Electric (QD75D) used for
position control mode.
(Connection example of the differential receiver system)
Refer to the operation manual of LECSB and the technical data and the
operation manual of PLC and positioning unit.
Driver
Controller







































































