



Symbol description: “
☆
” means HY, “▲” means alarm value, “ ” means SV value
7
8
9
10
11
12
SV
SV
SV
SV
SV
SV
SV-AL1
SV-AL1
SV-AL1
SV+AL2
SV+AL2
SV+AL2
AL2
AL2
AL2
AL1
AL1
AL1
1
2
4
5
6
SV+AL
SV+AL
SV-AL
SV-AL
SV
SV
SV+AL
SV-AL
AL
SV
SV
SV
SV
PV
PV
PV
PV
PV
PV
PV
PV
PV
PV
PV
PV
AL
☆
☆
☆
☆
☆
☆
☆
☆
☆
☆
☆
☆
☆
☆
☆
☆
☆
☆
☆
▲
▲
▲
▲
▲
▲
▲
▲
△
△
△
☆
▲
△
△
△
△
▲
▲
△
▲
▲
△
▲
▲
△
▲
▲
▲
▲
△
△
▲
SV
SV
SV
SV
SV
SV
SV-AL1
SV-AL1
SV-AL1
SV+AL2
SV+AL2
SV+AL2
AL2
AL2
AL2
AL1
AL1
AL1
2
3
SV+AL
SV+AL
SV-AL
SV-AL
SV
SV
SV+AL
SV-AL
AL
SV
SV
SV
SV
PV
PV
PV
PV
PV
PV
PV
PV
PV
PV
PV
PV
AL
☆
☆
☆
☆
☆
☆
☆
☆
☆
☆
☆
☆
☆
☆
☆
☆
☆
☆
☆
▲
▲
▲
▲
▲
▲
▲
▲
△
△
△
△
☆
▲
△
△
△
△
▲
▲
△
▲
▲
△
▲
▲
△
▲
▲
▲
▲
△
△
▲
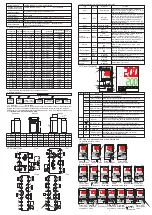
(1) Alarm parameters and output logic diagram:
Alarm
code
Alarm mode
Alarm output
(
AL1 & AL2 are independent from each
)
Image:the hatched section means the alarm action
High limit absolute value
alarm
Low limit absolute value
alarm
※
High limit deviation
value alarm
※
Low limit deviation value
alarm
※
High/low limit deviation
value alarm
※
High/low limit interval
value alarm
Alarm
code
Alarm mode
The below two alarm parameters(AL1,AL2) are used in
combination, AL1 alarm output, AD2 must be set as 0
High and low limit absolute
value interval alarm
※
High and low limit deviation
value interval alarm
※
High limit absolute value
and low limit deviation value
interval alarm
※
High limit deviation value
and low limit absolute value
interval alarm
High/low limit absolute value
alarm
High/low limit deviation value
alarm
※
For deviation alarm, if alarm value is set as a negative number, it will be used as an absolute
value.
No.
Name
Symbol
Illustration
Setting range
Factory
setting
1
2
4
AL1
HY1
AD1
(
1
)
AL2
HY2
AD2
(
1
)
FL
~
FH
0
~
1000
0
~
12
FL
~
FH
0
~
1000
0
~
6
-1999
~
9999
10
1
3
5
1
4
0
6
5
OT
0
~
5
INP
K1
1
0
~
9999
120
1
~
200
20
4
~
200
20
PC
10.0
OVS
0
~
9999
5
DB
-1000~1000
5
LCK
0~9999
0
0
~
9999
30
8
9
0
~
9999
30
A-M
AUTO~AM
AUTO
10
3
AD1
(
1
)
PS
0
~
12
3
7
I
CP
CP1
0.1
~
100.0
OVS
LCK
P
12
13
14
15
16
17
18
19
11
D
1st alarm hystersis
2nd alarm value,
2nd alarm hystersis
2nd alarm mode
OUT1 control cycle, 1: SSR control output,
4-200: relay control output. Unit: s
OUT2 relay output cycle. Unit: s
OUT2 cooling proportionality coefficient, the higher of
value,the stronger of cooling
ON/OFF control hystersis(positive and negative
numbers work the same); when OT=3, it is the dead
zone for cooling control(positive and negative
numbers work differently);after change the INP
setting, please change this parameter according to
the decimal point position.
Lock function. 0001:SV value can’ t be modified.
0010: menu set value can be checked only, can’ t
be modified. 0033: enter to advanced menu.
0123: menus reset to factory setting.
Overshoot limit, during PID control process, when
PV(measured value) > SV(set value) + OVS
(overshoot limit), force to close output. The smaller
this value is, the smaller the PID adjustment range
is, the worse the control stability is. Please set the
appropriate value according to the actual situation.
Differential time, the greater the value is, the stronger
the differential actiontion is, otherwise, it is weeker.
When D=0, no differential action. Set D=0 when
controlling fast systems, e.g., pressure, speed; unit: s
Integral time, the smaller the value is, the stronger the
integral action is, otherwise, it is weeker. When I=0,
no integral action, unit: s.
Proportional band, the smaller the value is, the faster
the system responds, otherwise, it is slower. When
P=0, no PID control, unit same as PV
Amend value, display value= actual measured value
+ amend value
Control mode, 0:ON/OFF heating control, relevant
parameter: DB.
1: PID heating control, relavant parameters:
P, I, D, OVS, CP, ST, SPD, PDC.
2: ON/OFF cooling control, relevant parameter DB;
need to set PT when it is used for compressor control.
3:PID heating & cooling control (cooling control OUT2
will output through AL1 relay), relevant parameters: P,
I, D, OVS, CP, CP1, PC, DB, ST, SPD, PDC.
4: Over temperature cooling output
,
relevant
parameter: DB
5. PID cooling, relevant parameter: P, I, D, OVS, CP,
ST, SPD, PDC.
Optional input signal. Note: after selecting the signal,
pls properly set below relevant parameters: SV, AL1
,
HY1
,
AL2
,
HY2
,
P
,
OVS
,
DB.
Auto-manual control switch, AUTO(0): auto control
only; MAN(1): manual control only;
AM(2): auto-manual shortcut switch
refer to input
signal para-
meters table
(page 3)
1st alarm mode. Note:when AL1 is used as OUT2(co-
oling output), should set AD1=0(close alarm function).
When AD1>6, 2nd alarm function is invalid.
No.
Name
Symbol
Illustration
Setting range
Factory
setting
IX. Menu Illustration
1. Regular Menu
:
No mater what model, what control mode it is, it will always display these parameters.
:
According to different model, control mode, these parameters will be hidden.
1st alarm value, note: the minus is dealed as absolute
value when it is set as deviation alarm. Refer to
(1) Alarm parameters and output logic diagram
5
6
2
、
Operation examples
1. Set target
temperature
SV=100
2
、
Advanced Menu
22
20
21
ACT
Control execution type. 0: relay or SSR output.
1:SSR output (Code type M select this item).
2: 4~20mA control output, 3: 4~20mA retransimition
output for size 4/7 products. Note:For size 6/8/9
products, when this menu is set as 0 or 1, 4-20mA
output is used as retransimition output.
0~2
(
6/8/9 size
)
0~3
(
4/7 size
)
0
AE1
1st alarm extensions function, refer to (2) alarm
extension function table
0~5
0
0~5
0
0~3
0
AE2
DP
2nd alarm extensions function, refer to (2) alarm
extension function table
Decimal point setting, maximum 1 decimal place for
TC & RTD input
23
2. Set menu
INP=K
3. Set menu
OT=0
4. Set menu
DB=2
5. Set menu
ACT=0
6. Set menu
AL1=110
7. Set menu
HY1=5
8. Set menu
AD1=1
1. Set target
temperature
SV=150
2. Set menu
INP=pt
3. Set menu
OT=1
4. Set menu
OVS=5
5. Set menu
ACT=0
6. Set menu
AL1=5
7. Set menu
HY1=7
8. Set menu
AD1=3
25
→
→
→
150
inp
pt
ot
1
5
→
ACT
0
→
AL1
5
→
HY1
7
→
AD1
3
1
)
Example 1, ON/OFF control
:
Sensor
:
K type, measure range -50~1300
℃
; target temperature: 100
℃
; control mode:
heatin; control requirement: ON/OFF control, when current temperature PV reaches 100
℃
,
stop heating; when PV is lower than 98
℃
, start heating again; control output: relay; alarm: 1
alarm, when PV>110
℃
, alarm output on; when PV<105
℃
, alarm output off.
2
)
Example 2, PID control:
Sensor: PT100, measure range -200~600
℃
; target temperature: 150
℃
; control mode:
heating; control requirement: PID control (note: in order to get stable temperature control,
please use the auto-tuning function when the controller is powered on for the first time; if the
temperature control is stable after the auto tuning, there is no need to repeat this step in the
future usage.); control output: SSR; alarm: 1 alarm, when PV>SV+5
℃
, alarm output on,
when PV<SV-2
℃
, alarm output off.
25
→
→
→
100
inp
ot
0
db
2
→
ACT
0
→
AL1
110
→
HY1
5
→
AD1
1
42
43
45
CAL
CAH
VER
YES/OK
YES/OK
YES
YES
44
SSM
0
~
1
0
Software version, read only
Self-calibration low limit input operation, after adding
the low end signal to the signal input terminal, flash
YES to activate, after confirm and display OK, the
input signal low end calibration is completed.
Self-calibration high limit input operation, after adding
the high end signal to the signal input terminal, flash
YES to activate, after confirm and display OK, the
input signal high end calibration is completed.
Enable R/S key to switch RUN / STOP operation.
0: Forbidden 1: Enable This setting is only for
panel operation, not for communication operation.
CAE
0
(
N
)
1
(
Y
)
N
41
User self-calibration enable function, this parameter
is only for the input signals except TC/RTD;
Y:enable the self-calibration parameters;
N: don’ t use the self-calibration parameters.
No.
Name
Symbol
Illustration
Setting range
Factory
setting
27
28
FL
-50
FH
1200
29
30
31
32
33
34
35
BRH
OLH
ST
SPD
0.0
~
105.0
0~1
0~1
1200
100.0
BRL
FL~FH
FL~FH
OLL
0
0
0~6
N
PDC
FUZ
-5.0~100.0
-50
36
PT
0~9999
0
37
38
BAD
ADD
DTC
9.6
1
1~247
0
Modbus Communication ADD
39
40
0~2
0~2
N0
PRTY
PV fuzzy tracking value, properly set this value on
some occasions, it can get a more stable control
display value, this value is unrelated with actual
measured value. Note: after setting this value, when
alarm setting value is equal to SV set value, alarm
output operation is subject to actual measured value.
Set as 0 to close this function.
26
Filter coefficient, the higher of value, the stronger of
filter function
UT Temperature unit:
℃
: Celsius degrees.
℉
: Fahrenheit
degrees. Note: No unit for linear signal
(25)
℃
(25)
℃
(26)
℉
25
FT
0
~
255
10
(0~20)
DTR
0.0
~
2.0
(10)
1.0
24
0
0~2
Measuring range low limit and high limit.
For temperature sensor input, please keep the factory
setting value. For 4 ~ 20mA / 0 ~ 10V input, please
set the corresponding range for the low limit and the
high limit. For example, 0~10V corresponds to -20~50,
set FL to - 20, set FH to 50. Setting range:
-1999~9999, associated with DP decimal point menu.
4~20mA analog output low limit and high limit. For
example, 4~20mA corresponds to 0~100, set brL to 0,
set brH to 100. Note: it can be set as reverse analog
output, for example, 100~0 corresponds to 4~20mA.
Current control output low limit and high limit, only
valid for 4~20mA current control output. It is used to
limit the output current amplitude. For example, in the
control of frequency converter, if the motor cannot be
stopped, please set the output low limit OLL to 10%;
in heating control, if the user don’ t want full-power
output at the beginning of heating, please set the
output high limit OLH to 80%.
Compressor start delay time, unit: sec
Baud rate 0 (4.8): 4800
;
1 (9.6): 9600;
2 (19.2): 19200
Communication parity check setting
,
0
:
NO 1
:
ODD 2
:
EVEN
Communication data transport sequence 000;
1st bit function reserved; 2nd bit is byte sequence
exchange; 3rd bit function reserved.
Auto-tune activation after power-on, 0: work normally
after power-on, 1: automatically enter PID parameters
auto-tune status after power-on; long press “ AT ” key
to exit auto-tune.
PID control speed adjustment,option: 0 (N) no function,
1 (s) slow, 2 (ss) medium slow, 3 (SSS) very slow,
4 (F) fast, 5 (FF) medium fast, 6 (FFF) very fast
PID algorithm option: 0(FUZ): Advanced fuzzy PID
arithmetic; 1(STD): normal PID arithmetic
Refer to
measured
signal
parameter table
Refer to
measured
signal
parameter table
Refer to COMM.
protocol
note
③







































































