



























L6470
Phase current control
Doc ID 16737 Rev 2
33/64
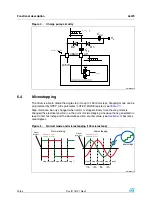
Motor supply voltage compensation can be enabled setting high the EN_VSCOMP bit of the
CONFIG register (see
, paragraph
). If EN_VSCOMP bit is low the
compensation is disabled and the internal analog to digital converter is at user disposal;
sampling rate is always equal to PWM frequency.
7.6 Winding
resistance
thermal drift compensation
The higher is the winding resistance the greater is the voltage to be applied in order to
obtain the same phase current.
The L6470 integrates a register (K_THERM) which can be used to compensate phase
resistance increment due by temperature rising.
The value in K_THERM register (see paragraph
) multiplies duty cycle value allowing
to face higher phase resistance value.
The compensation algorithm and the eventual motor temperature measurement should be
implemented by microcontroller firmware.
Figure 15.
Motor supply voltage compensation circuit
!-V
!$#).
!$#
F
07-
!$#?/54
6
3
6
2%'
2
!
2
"
6
!$#).
6
3
X2
"
2
!
2
"







































































