





























- 32 -
CLRS Series RS485 Closed Loop Stepper Drive User Manual
Limit switch homing: Set by register address 0x600A, or STEPPERONLINE software. If the homing direction is
positive, then it is positive limit switch homing. Conversely, the negative limit homing.
Home switch: Set by register address 0x600A, or STEPPERONLINE software. If the motor turns toward the
home switch when zeroing, it will use the home switch it touches as the home point; if the motor turns in the
opposite direction when zeroing, it will automatically reverse to find the home point after it touches the limit
switch.
Manual set to zero position: Set by register address 0x600A, or by tuning software. After triggering, the current
value of the motor is cleared to zero and the current point is used as the origin.
Note: In the normal homing, because the motor to find the origin process is slowed down and stopped, so after
finding the origin will move a certain distance, the actual read position value may not be 0, in this case, you can
check the "return to the origin to move to the specified position", that is, move to the 0 position.
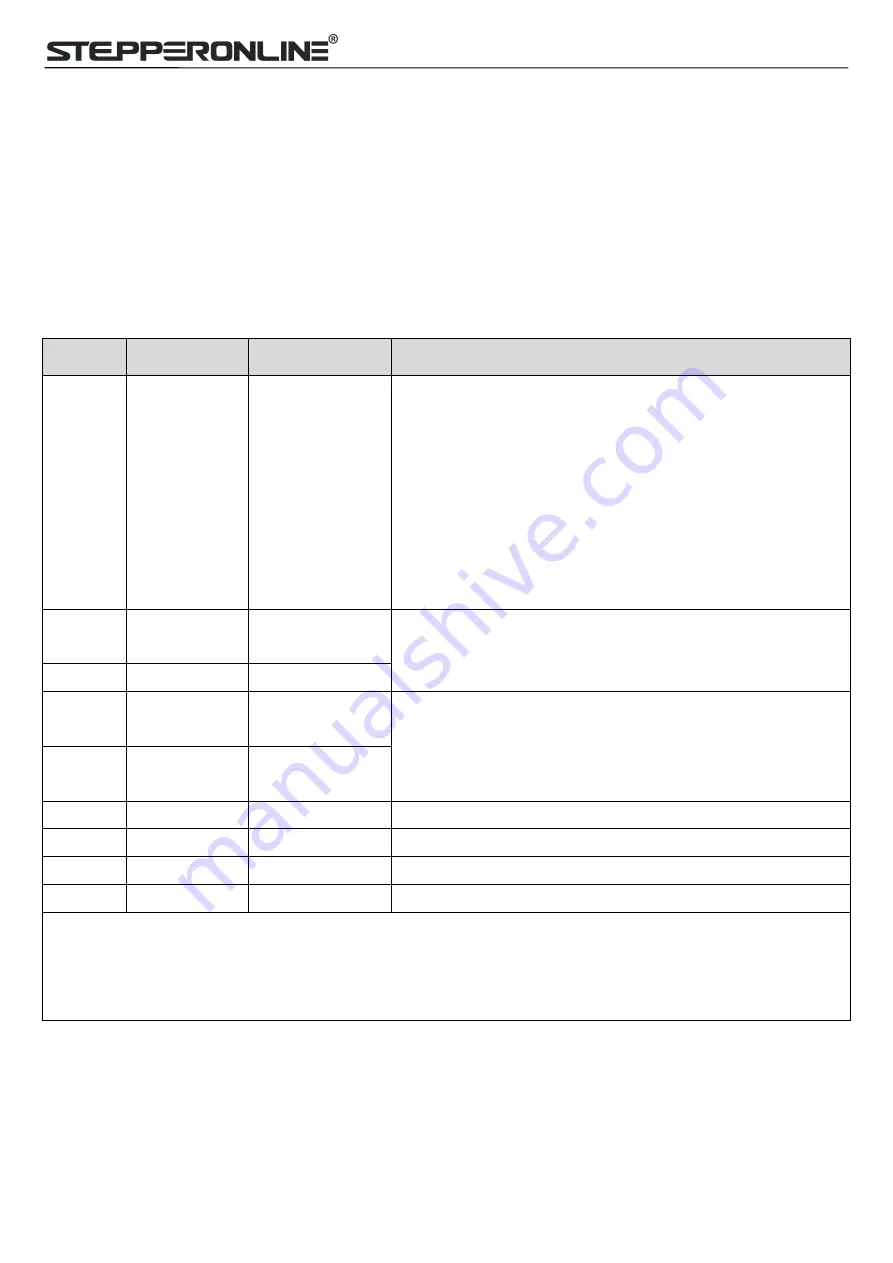
5.2.1 Homing Parameters
Parameters Register address
Definition
Description
Pr8.10
0x600A
Homing mode
Bit0: homing direction
=0: CCW;
=1: CW.
Bit1: move to the Specified point after homing?
=0: No;
=1: Yes.
Bit2- Bit3: homing method
=00: Homing by detecting limit switch signal
=01: Homing by detecting Home Switch signal
=10: Homing by Z signal (index signal)
Note:
(1) Write 0x21 to the address 0x6002 to set the current point to zero
position;
(2) Write 1 to the bit2 of address 0x6000 can set to auto-homing after
powering on;
Pr8.11
0x600B
Home Switch position
high bits
The Home Switch position on the coordinate system.
Pr8.11 is high 16 bits, and Pr8.12 is low 16 bits
Pr8.12
0x600C
Home Switch low bits
Pr8.13
0x600D
Homing stop position
high bits
The motor moves to the Specified position after homing. If bit1 of Pr8.10=1,
the motor will move to Specified absolute position. Pr8.13 is high 16 bits ,
and Pr8.14 is low 16 bits.
Pr8.14
0x600E
Homing stop position
low bits
Pr8.15
0x600F
Homing high velocity The 1
st
segment velocity of homing, unit: rpm
Pr8.16
0x6010
Homing low velocity
The 2
nd
segment velocity of homing, unit: rpm
Pr8.17
0x6011
Homing Acc
Acc of homing, unit: ms/1000rpm
Pr8.18
0x6012
Homing Dec
Dec of homing, unit: ms/1000rpm
Note: Generally homing to find the zero position, the motion is decelerating to stop, so after finding the zero position will also move a
distance, resulting in the actual read position value may not be mechanical zero point, but will still output homing completion signal. If
the motion is an absolute position mode, it does not matter. But if the user does care about the zero position, you can set the value of
home offset to reach the mechanical zero point
5.2.2. Homing by Home Switch
Set value 1 to the bit2 of 0x600A, and then according to the homing direction, positive or negative limit switch and
location of home switch, it can be combined into the following four cases.
(1) Home Switch & Positive Limit Switch







































































