




























- 42 -
CLRS Series RS485 Closed Loop Stepper Drive User Manual
If SI2 and SI3 are “off”, and only SI1 is “on”, the path 1 is triggered. If the velocity of path 1 is 0, i.e. the motor
stops immediately.
Path number
SI2(ADD0)
SI3(ADD1)
SI4(ADD2)
Path 1
ON
OFF
OFF
Path 2
OFF
ON
OFF
Path 3
ON
ON
OFF
Path 4
OFF
OFF
ON
Path 5
ON
OFF
ON
Path 6
OFF
ON
ON
Path 7
ON
ON
ON
Note: “on” the input signal optocoupler on, “off”means signal optocoupler off.
5.5.3 Fixed Trigger
Fixed trigger mode is after configuring homing and path (less than 16-segment), then use Pr8.02( 0x6002) to start
the operation path which replace IO functions of CTRG and HOME. This method is suitable for systems with fixed
and simple motion. (Recommended).
Steps as below:
1. Firstly, configure required homing and path, it can be set through controller/PLC software after power-on , or
through STEPPERONLINE PC software;
2. Enable drive;
3. Write corresponding command to the 0x6002 to realize the selection and startup of each action.
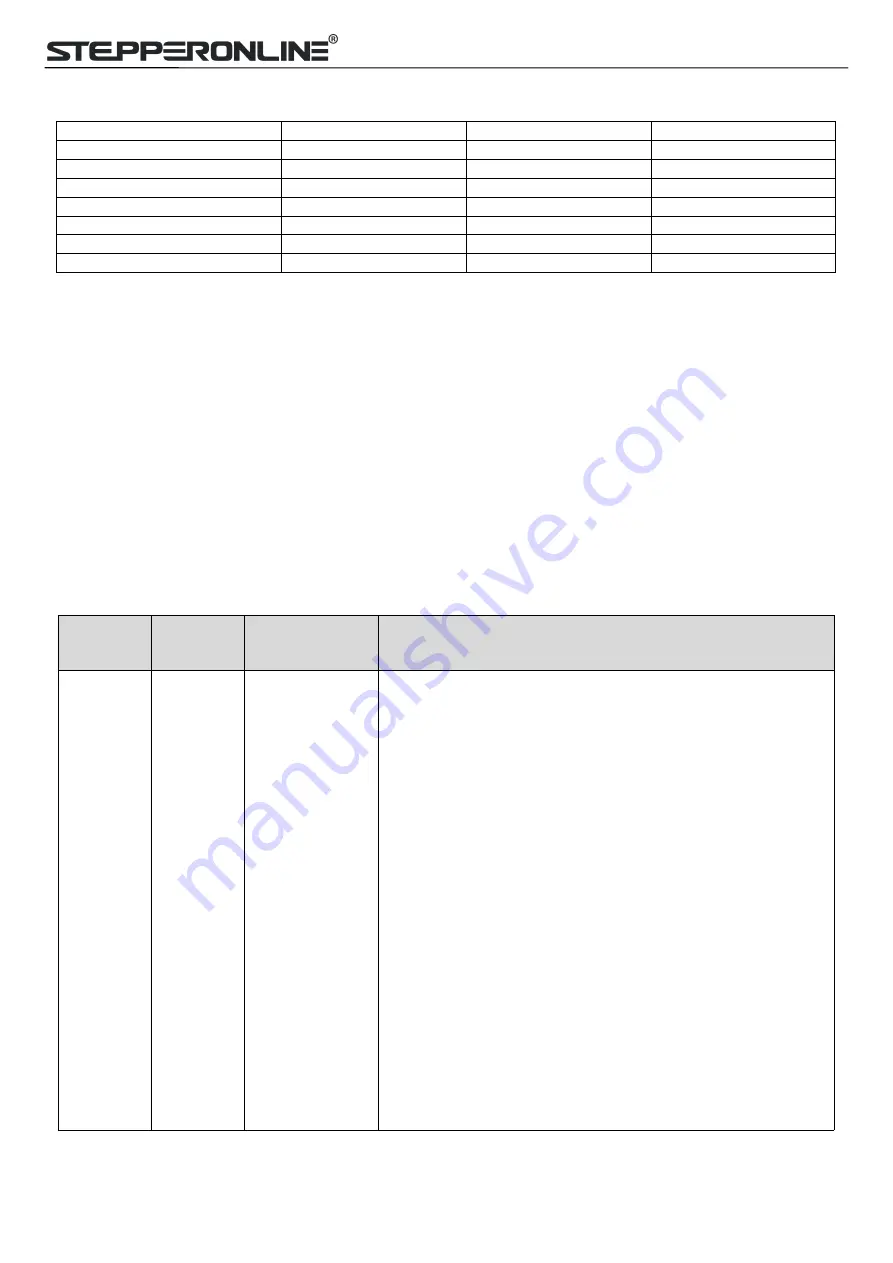
Par. #
Register
address
Definition
Description
Pr8.02
0x6002
Trigger register
Write corresponding command to the 0x6002 to realize the
selection and startup of each action.
Write value 0x01P----P-segment positioning, (P indicates path
#0-15);
Write value 0x020---- Homing; (edge triggered)
Write value 0x021---- Set the current position as origin by
manual;
Write value 0x040---- E-stop;
Read value 0x000---- Positioning is completed and new data
can be received;
Read value 0x01P, 0x020, 0x040---- Not responding to the
command;
Read value 0x10P---- Path is running;
Read value 0x200---- Command is completed and waiting for
positioning.
Note: (P indicates path NO. 0-15);







































































