





























Modbus RS485 Stepper Drive User Manual
39
Multi-segment jump path sequence diagram
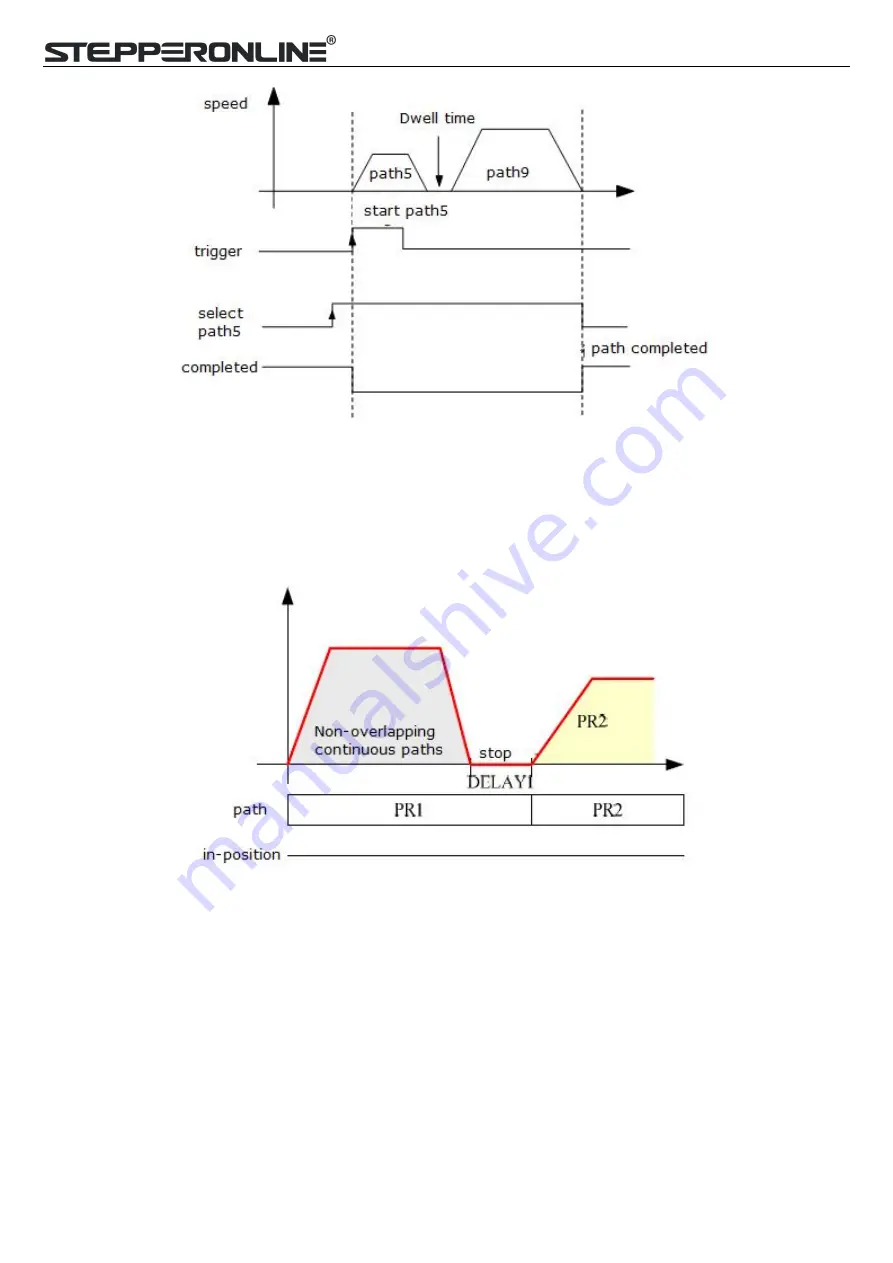
Continuous movement
The bit5 of Pr9.00 is 0 , which does not overlap the continuous path.
As shown in the figure below, set PR1 (PR path1) and PR2 (PR path2) to run continuously and PR1 jump. There is
no in-position signal in the intermediate delay from PR1 jump to PR2.
Continuous movement timing sequence (no overlap).
Interrupt function
The interrupt function is the priority of a PR path. Interrupts a valid path means that interrupting and abandoning the
current path under trigger, and runs another path directly, which is similar as Interrupt priority of function.. As below
example, interrupt the PR1 (PR path1) to run PR2 (PR oath2)







































































