





























EN
51
0478 131 8349 A - EN
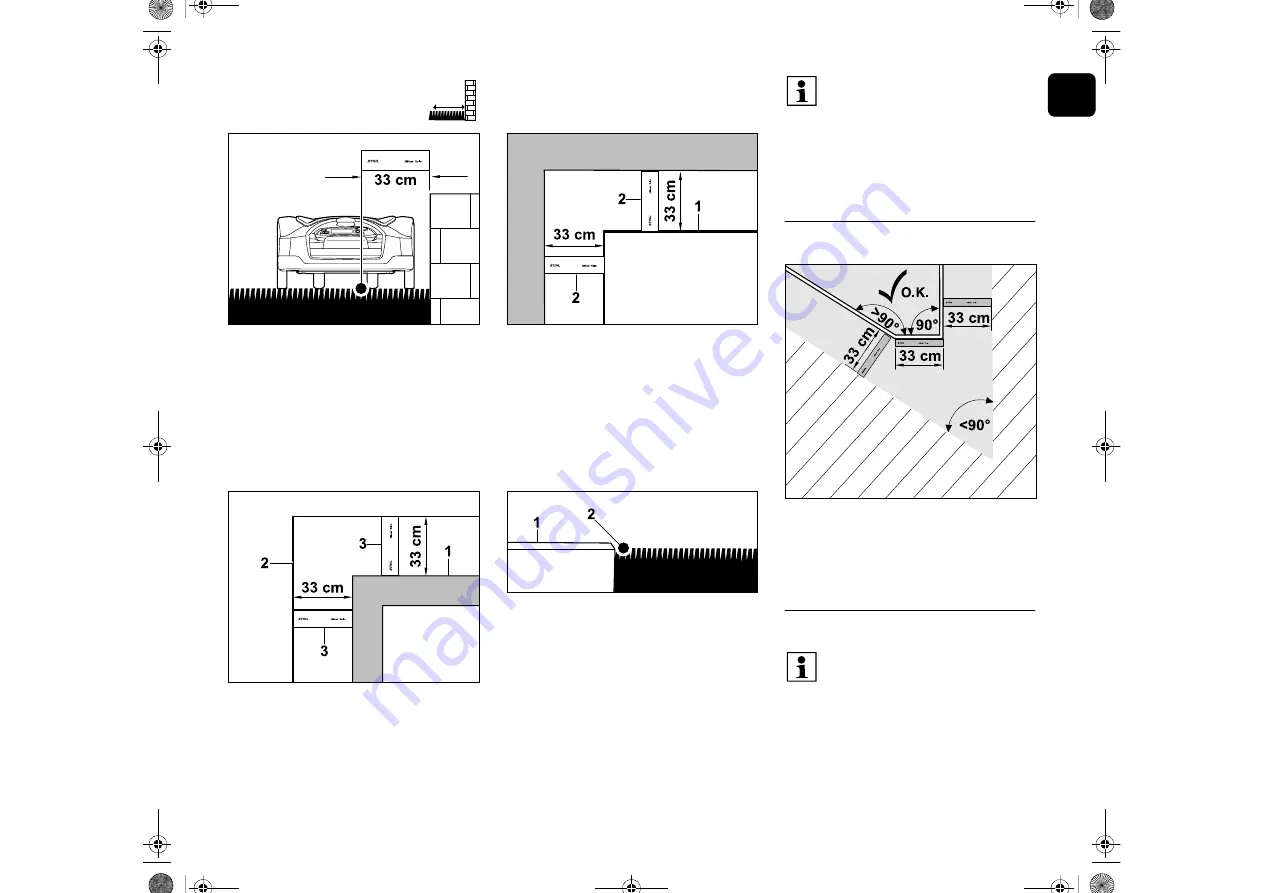
High obstacle:
Clearance between a high
obstacle and the perimeter wire.
The robotic mower must run completely
within the mowing area and must not touch
the obstacle.
Through the clearance 33 cm, the robotic
mower travels along the perimeter wire
without bumping into the obstacle in the
corner around a high obstacle.
Wire routing around high obstacles:
When routing around high obstacles (1)
such as wall corners or high flowerbeds,
the wire clearance must be maintained at
the corners to prevent the robotic mower
from scraping against the obstacle. Route
the perimeter wire (2) with the aid of the
iMow Ruler (3) as illustrated.
Wire clearance: 33 cm
When routing the perimeter wire (1) at an
internal corner at a high obstacle, measure
the wire clearance with the iMow Ruler (2).
Wire clearance: 33 cm
Measuring the height of obstacles:
The robotic mower can cross adjoining
areas such as paths if the height of the
stepped area is less than
+/- 1 cm
.
Height difference to obstacle that can be
travelled on (1) is less than +/- 1 cm: route
the perimeter wire (2) without clearance to
the obstacle.
12.6 Acute corners
The perimeter wire is routed as illustrated
in acutely angled lawn corners (< 90°).
The two angles must have a clearance of
at least
33 cm
so that the robotic mower
can follow the edge.
12.7 Confined areas
The robotic mower travels automatically in
all confined areas, provided the minimum
wire clearance is maintained. Narrower
If necessary, set the
cutting height
so that the mowing deck of the
robotic mower does not hit the
obstacles.
If the lowest cutting height is set,
the robotic mower can
consequently only clear lower
stepped areas than specified.
If confined areas are to be installed,
switch off offset drive home
(passage) (
11.14) or install guide
loops. (







































































