





























www.sunfounder.com
14
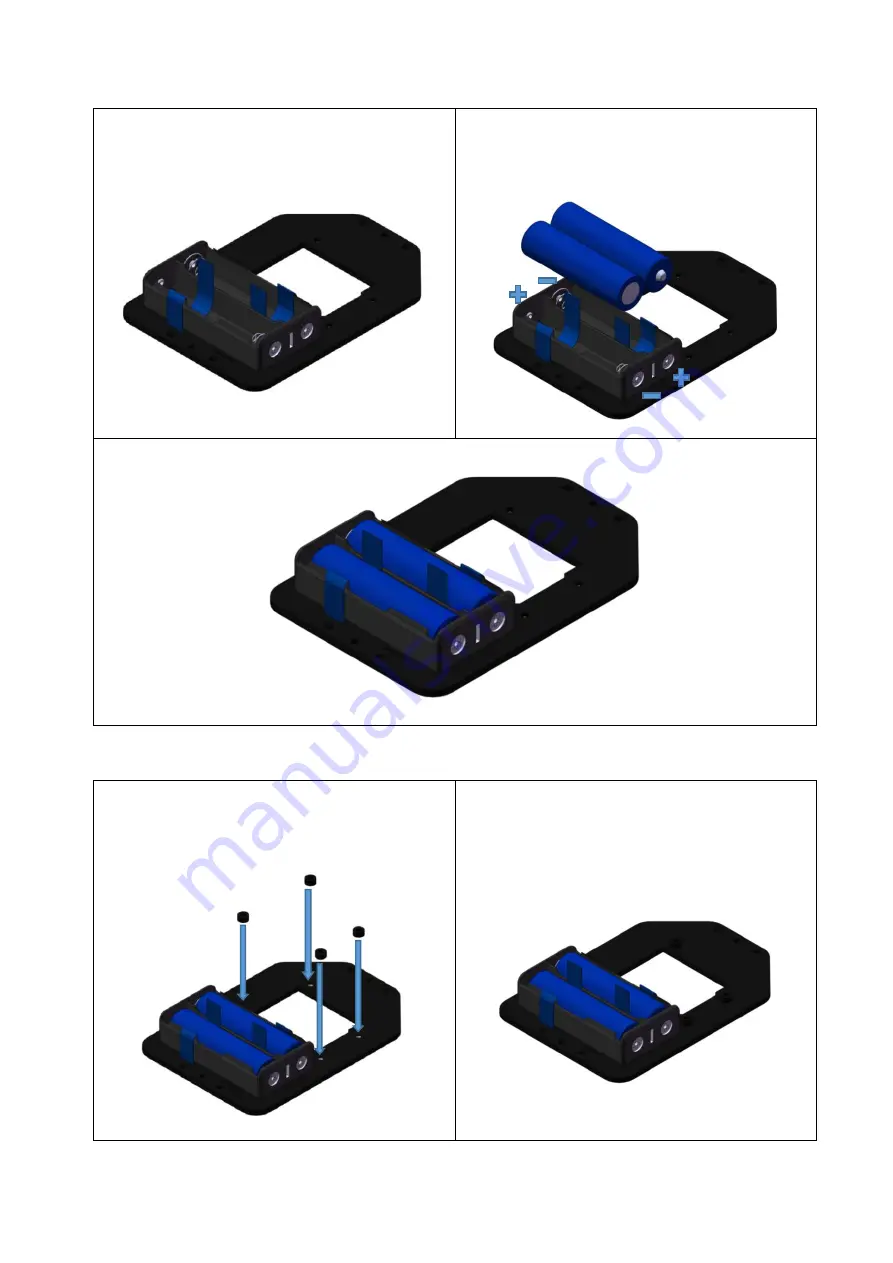
3.
Fold the ribbon in the battery holder.
4.
Align the anode of the battery with
that of the battery cover and so does the
cathode.
5.
Insert the battery into the battery holder.
5.3
Base Bottom Plate + Circuit Board
1.
Align the four acrylic washers with the
holes of the base bottom plate (a spare
washed is provided in case).
2.
Place the four acrylic washers on the
base bottom plate.

































































