






















ROLLBOTMICRO
23
2)
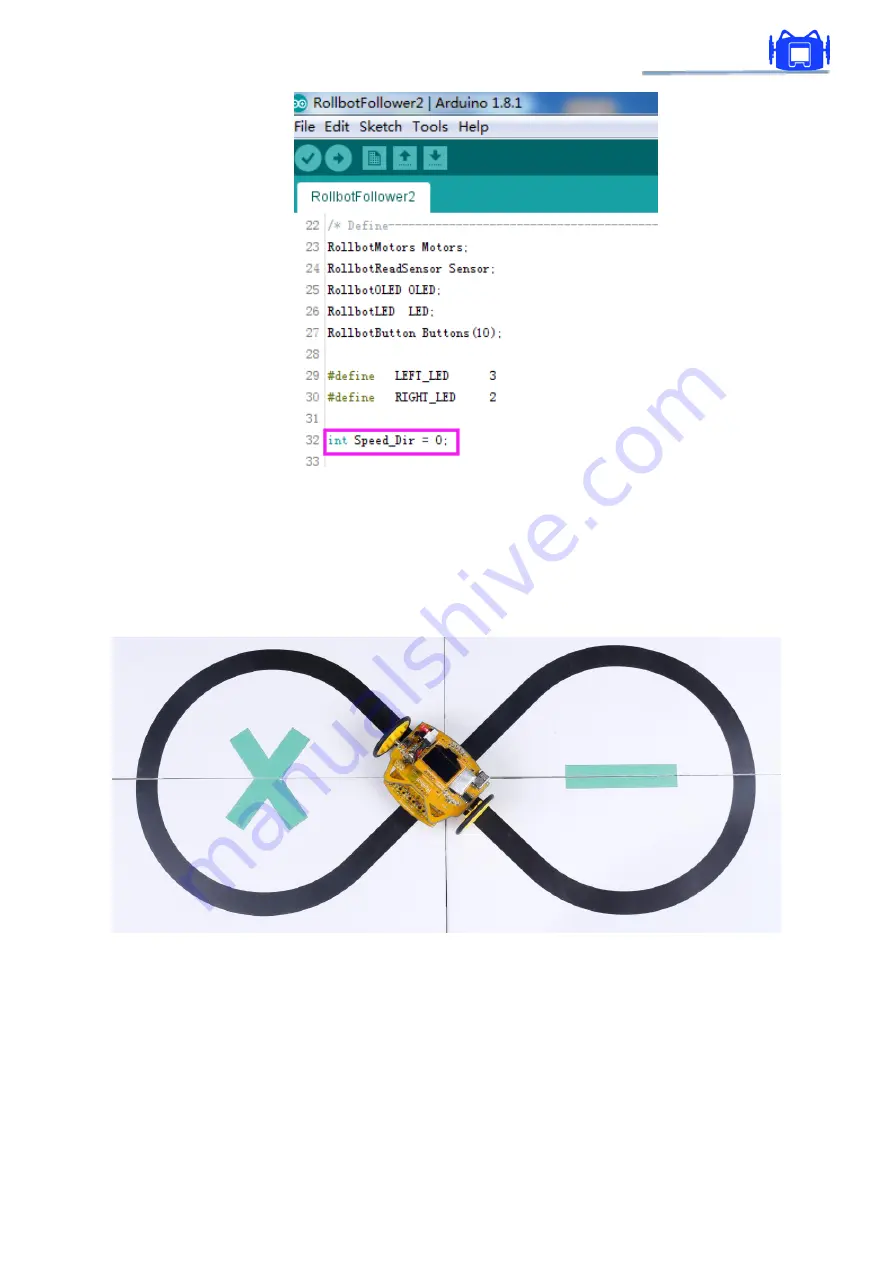
Put the completed map on a smooth surface like a table. Turn on the robot and place it with
the middle detector over the black line on the map. Press the start button for more than 2
seconds. The robot will test the reference value of the black line automatically. Just wait
patiently till it backs to the initial position after swaying a bit. This process is to test the
sampling value of the black line. Then the robot will move along the line.
You can try more possibilities such as using a white chalk to draw maps on a dark smooth
surface like the floor, set a gift at the end, and then wait for the RollbotMicro to discover the
mysteries. The program for using chalk to draw the map is not provided in our data package.
You can try to change the
SignalValue
into
Sensor.Read_WhiteFlag()
to explore.
SunFounder







































































