























24
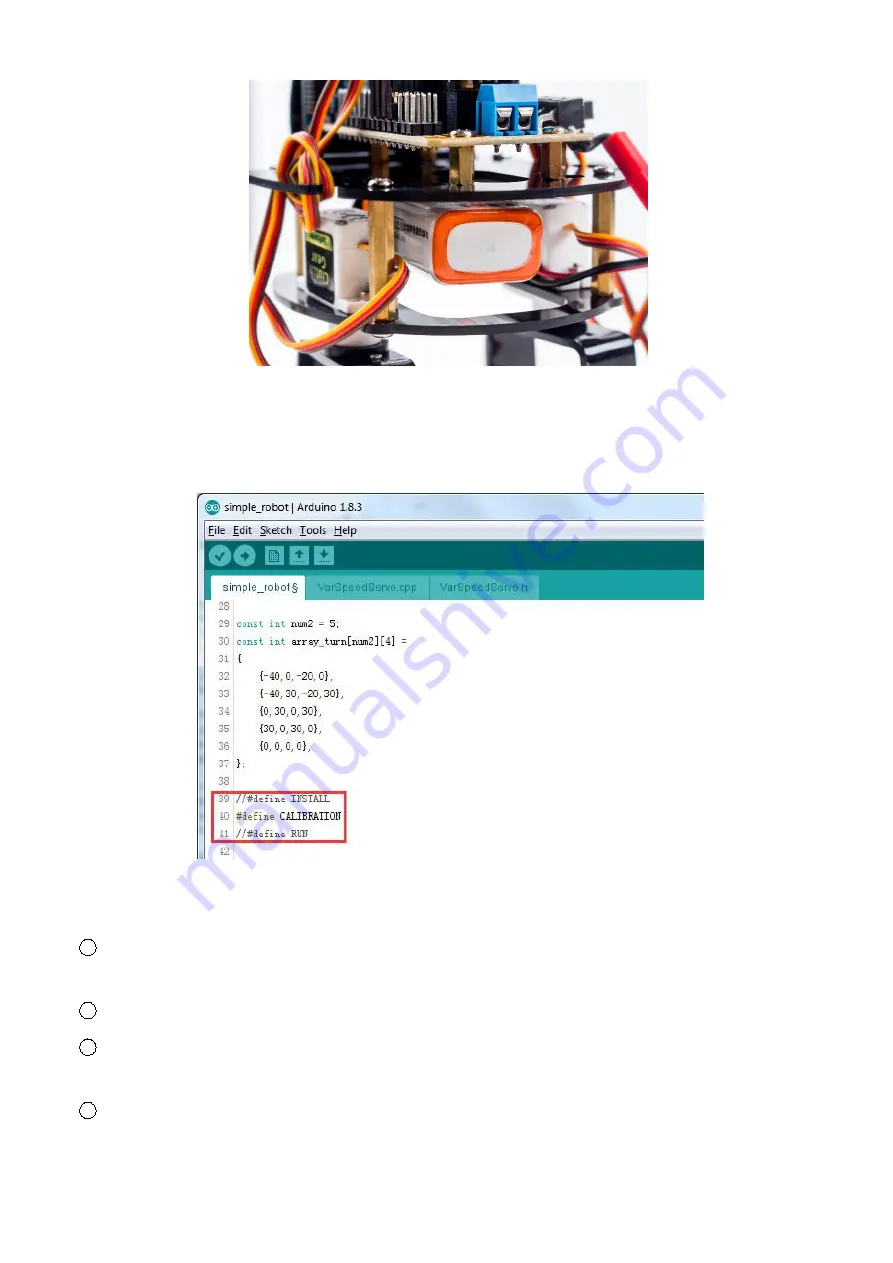
vii. Servo CALIBRATION Test
Open the program and go to
Line 39
,
disable
the
INSTALL
and
activate
the
CALIBRATION
.
Select the correct board and port, then upload the sketch. If the robot is not set right,
change the angle and upload the code until it is.
Tips for calibration:
1
If the right leg is toe out, you need to decrease the upper-right servo’s angle; if it is
toe in, you need to increase the angle.
2
The calibration method for the left leg works the opposite way for right leg.
3
If the right foot’s sole faces outward, you need to decrease the lower-right servo’s
angle; if its sole faces inward, you need to increase the angle.
4
The calibration method for the left foot works the opposite way for right foot.




































































