





























©
2021 SwellPro All Rights Reserved
25
1.
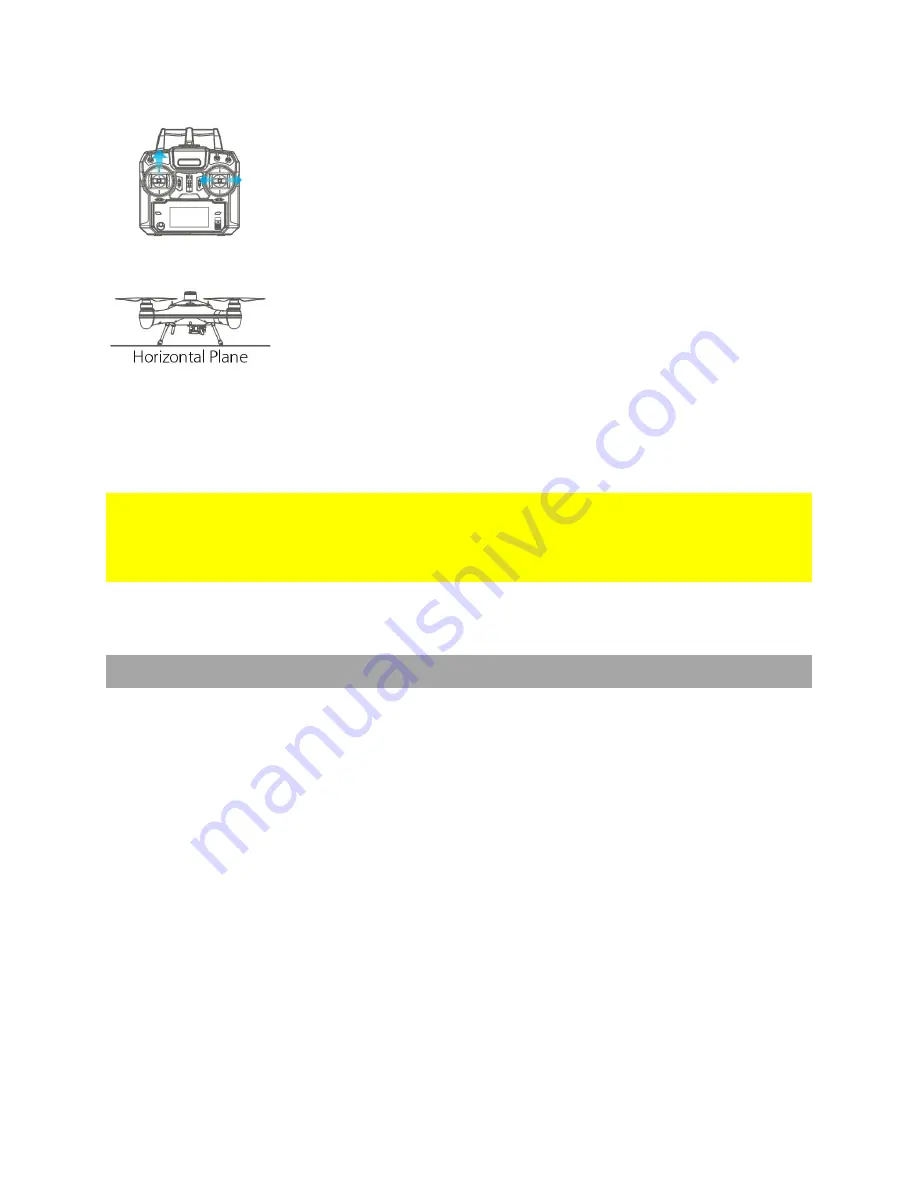
Place the drone on a level surface, power on the remote
controller, then the drone. Wait for the aircraft to connect to the
remote controller.
2.
Hold the left joystick up to its highest position, then quickly
move the right joystick left to right, back and forth, until the front
and rear status indicators flash alternately, or the remote
controller screen prompts "Initializing
…
". The drone will now
perform IMU calibration. Now release the joysticks. This process
will be completed in 20 seconds. Do not move the drone during
this process.
3.
When the front status indicators fast-flashing red and the rear
status indicators turn solid green or the "Initializing
…
" prompt
disappears, power off and restart the drone. IMU calibration is
complete.
1) Never calibrate the IMU on a boat or other moving platforms. 2) When the drone is
floating on water, it may occasionally prompt gyroscope calibration, which is normal and
can be ignored. 3) If the calibration fails, the "Initializing
…
" prompt will not disappear,
please follow the steps, and try to calibrate again.
Basic Flight Steps
1.
Check that the aircraft is correctly assembled.
2.
The propellers are correctly mounted and secure.
3.
Place the aircraft on flat open ground.
4.
Power on the remote controller, followed by the drone.
5.
Check the following flight data: flight battery > 16.0V; remote controller battery > 5V;
satellite > 5.
6.
For your safety, you should stand upwind and at least 3 meters away from the drone.
7.
Novice pilots should always take off in GPS mode.
8.
Arm the drone.
9.
Push the left(throttle) joystick up slowly, allowing the drone to take off smoothly.
Release the throttle when the drone is approximately 1.5 m high. Allow the drone to
hover for a moment to ensure flight stability.
10.
When you need to descend, gently pull down the left(throttle) joystick, allowing the
drone to descend and land on a flat surface.
11.
After landing, keep the left(throttle) joystick down to its lowest position for 3
seconds until the motors stop, or you can use the disarm joystick command to stop
the motors.

































































