















Register Value
Setting
0
Channel AOK
1
Channel PWM Input Faulty
40121
Channel PWM Long/Short average Setting
This value defines how many readings the PWM average is taken over. Default is 8
Register Value
Setting
0
8 Readings
1
4 Readings
2
8 Readings
40122
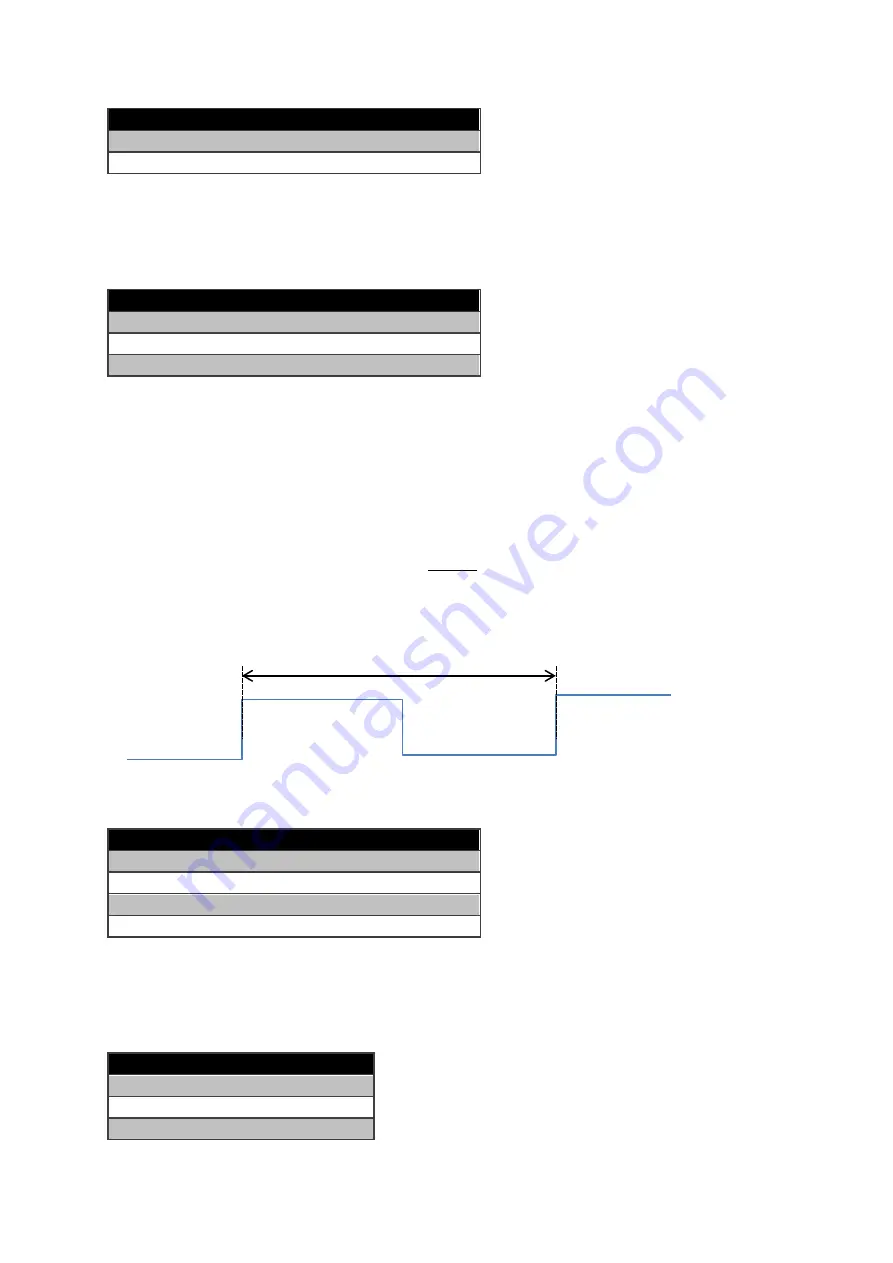
Pulse Count De-bounce Setting
Pulse Counting de-bounce period, this value in milliseconds (ms) gives the minimum gap between
pulses before a new pulse is counted.
The default is 10mS, i.e. a new pulse must start
at least
10mS after the first pulse was detected, this
prevents relay bounce or other spurious signals causing the counter to increment whilst still allowing
for <100Khz pulses to be counted.
Register Value
Setting
10
10ms de-bounce
20
20ms de-bounce
100
100ms de-bounce
x
x ms de-bounce
40123 - Modbus Baud Rate
This sets the serial baud rate of the unit – Default setting is 19200
Register Value
Setting
0
19200
1
9600
2
14400
De-bounce value in ms







































































