








4
missprints and technical changes reserved
Instruction & Operating Manual
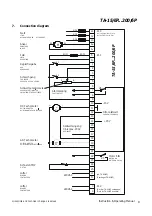
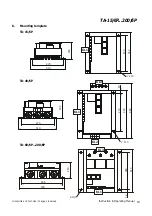
TA-15/6P...200/6P
3.
Drive control adjustments
Phase ballance
P1
Adjustments of the triggering angeles of the individual Thyristors in order to
obtain equal currents for all Thyristors.
Do not adjust.
(This potentiometer is adjusted and sealed by the manufacturer)
Acceleration rate
P2
Adjustment of the linear acceleration time of the motor from min. to max.
speed (2-15 sec.)
IxR Compensation P3
This potentiometer enables to compensate for the voltage drop in the
armature and in the supply line when armature feedback is utilized.
When tachometer feedback is used set this potentiometer fully counter
clockwise.
Deceleration
P4
Adjustment of the linear deceleration time of the motor (provided: positive
torque) from max. to min. speed (adjustable from 2-15 sec.) This
potentiometer is only operative when jumper
VI
is installed or when the
reference speed is changed.
Current limit
P5
Adjustment of the requested max. armature current.
(adjust the nominal motor current)
Minimum Speed
P6
Adjustment of min. speed during operation.
(set potentiometer fully counter clockwise)
Jog speed
P7
Speed adjustment for jog speed
Stability
P8
Adjustment for the dynamical adaption to the load.
Maximum speed
P9
Adjustment of max. speed during operation.
(set potentiometer fully counter clockwise)
Delay time
P10
Adjustment of the control relay from approx. 2-10sec.
(other delay times on request)
4.
Indicators
LED 1
clear
Thyristor triggering
LED 2
green
Power supply -15V
LED 3
red
Indication of malfunction of field, Blocking protection, Phase control, current
output control
LED 4
red
Triggering pulse fault, Current output control
LED 5
green
Power 15V
LED 6
red
Current limit/Over-speed
LED 7
yellow
Jog speed, relay d2
LED 8
green
Line voltage
LED 9
green
D.C supply ON, drive release
LED 10
yellow
Speed control indication (from 10 to 100%), operative only if jumper
VI
is
installed.
LED 11
yellow
Operation, relay d1







































































